Paso 3: Configuración y programación de lo XBee que transmite
Si no has programado de XBee antes usted debe echar un vistazo a los tutoriales de Adafruit en:
http://www.Ladyada.net/make/XBEE/Arduino.html También recomiendo usar software libre X-CTU para completar los pasos de configuración XBee. Asegúrese de que los tipos de módem XBee son los mismos y que llevan las mismas versiones de firmware. Esto se puede hacer enchufando tu XBee en el cable FTDI (necesidad de utilizar un adaptador XBee) y del click de la pantalla delantera de X-CTU en Test\Query para que aparezca la pantalla de información básica de XBee. Esto también asegura que tiene una correcta conexión serial entre el XBee y el ordenador. Desde allí en la Terminal más cercana a la parte superior de la pantalla, haga clic en y escriba los siguientes comandos.
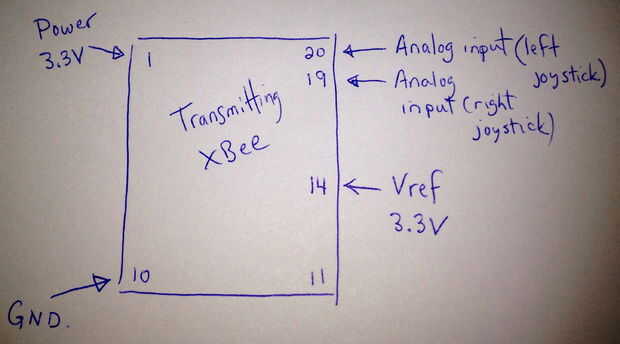
Los valores para el XBee remoto que transmite son como sigue:
+++ (inicia en modo comando)
Doméstico (reset configuración del módem)
ATMY1234 (set 10 bits transmisión dirección xbee)
ATDL5678 (indica dirección de 10 bits receptor xbee)
ATDH0 (posición cero)
ATID0 (ID debe ser el mismo para ambos XBees - aquí es cero)
ATD02 (sistema I/O pin 0 a analógico (2) entrada)
ATD12 (sistema I/O pin 1 a analógico (2) entrada)
ATIR64 (tasa de transferencia de datos del sistema a 100 mseg (hex 64 = 100 decimal))
ATWR (escribir datos XBee)
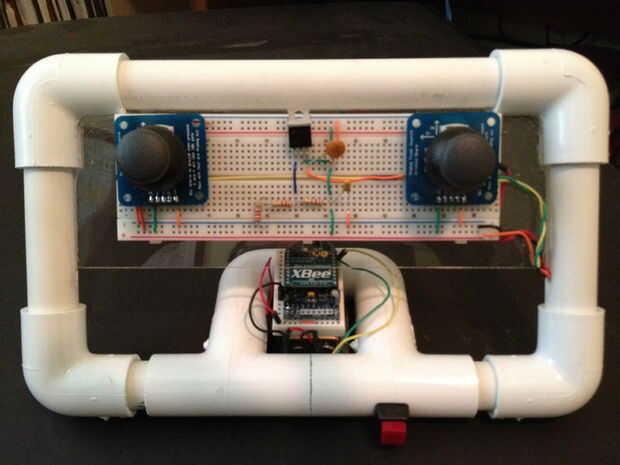
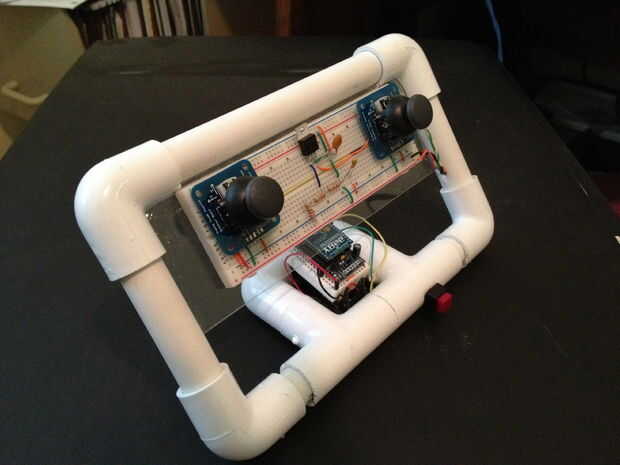
El diagrama de transmisión XBee indica que los cables necesitan estar conectados en el XBee que transmite. También puede notar en la foto que tengo un interruptor instalado. El flujo de electricidad va de la batería de 9V para el regulador de 3.3 V y además de alimentar la placa por el poder de la palanca de mando debe regresar al XBee para poder así. Animo a cable de la unidad exterior el PVC primero para que sea funcional y luego limpiarla según sea necesario. El PVC proporciona un conducto excelente para ocultar los cables. Como se muestra y luego pasar al paso siguiente donde nos pondremos el robot preparado para controlarse.




")

 de forma libre")






 de ferrocemento")