Paso 1: partes












1. Nexys4DDR Junta
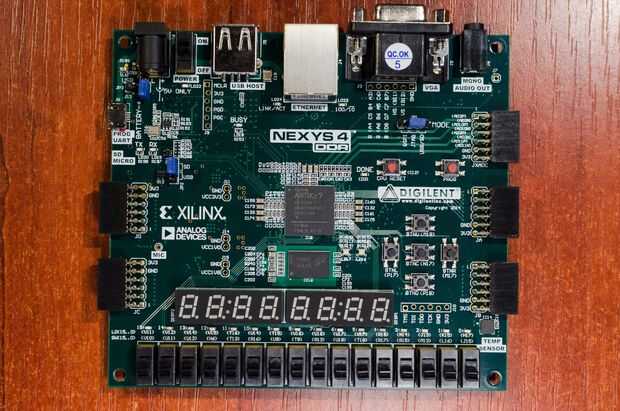
La Junta de Nexys4 DDR es plataforma de desarrollo basada en el Xilinx XC7A100T-1CSG324C Artix-7 campo programable Gate Array (FPGA).
Artix-7 100T características incluyen:
- 15.850 rebanadas de lógica, cada uno con cuatro LUTs de 6 entradas y 8 flip-flops
- Bloque de 4.860 Kbits de fast RAM
- Reloj de seis azulejos de gestión, cada lazo fase-bloqueado (PLL)
- 240 rebanadas DSP
- Velocidad de reloj interna superior a 450 MHz
- Convertidor de analógico a digital de la en-viruta (XADC)
El DDR de Nexys4 ofrece los siguientes puertos y periféricos:
- interruptores de usuario 16
- 16 LED de usuario
- Dos displays de 7 segmentos de 4 dígitos
- Puente USB-UART
- Dos LEDs tri-color
- Conector de tarjeta micro SD
- salida VGA de 12 bits
- Salida de audio PWM
- Micrófono PDM
- Acelerómetro de 3 ejes
- Sensor de temperatura
- Ethernet 10/100 PHY
- 128MiB DDR2
- Serial Flash
- Cuatro puertos Pmod (con 8 i/os por puerto)
- PMOD XADC señales (con 4 entradas diferenciales)
- Puerto USB-JTAG (para comunicación y programación de FPGA)
- Host USB HID para ratones, teclados (y palillos de la memoria para la configuración).
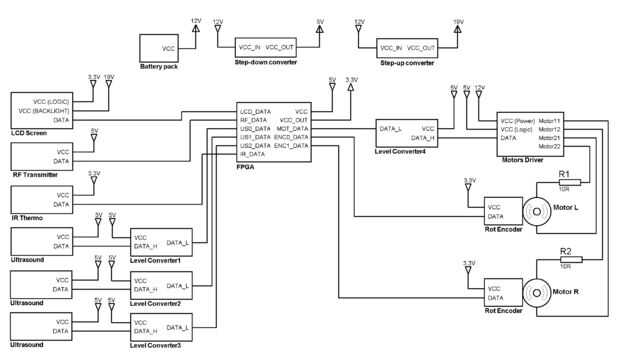
Este tablero se utiliza como el controlador principal en el proyecto, centralizar los datos de entrada (de los módulos de ultrasonido, sensor infrarrojo y codificadores rotatorios) y control de los periféricos de salida (LCD, controlador de motor y la segunda plataforma mediante RF).
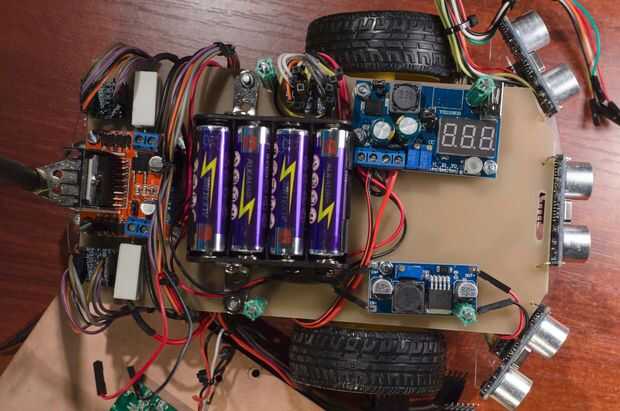
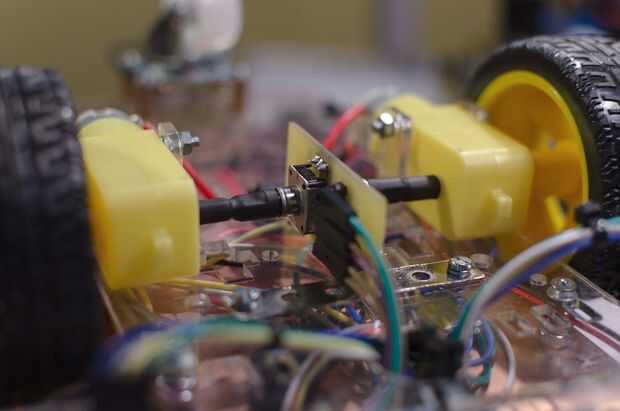
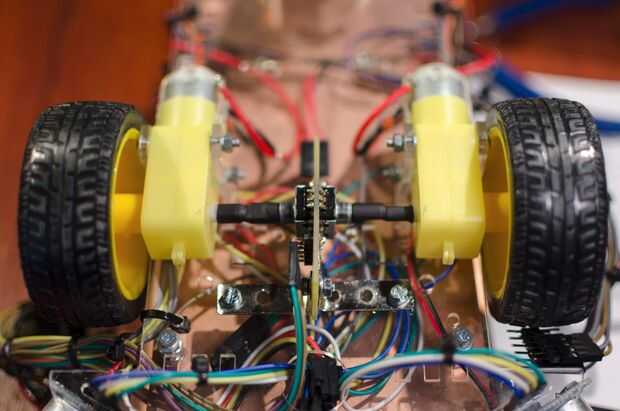
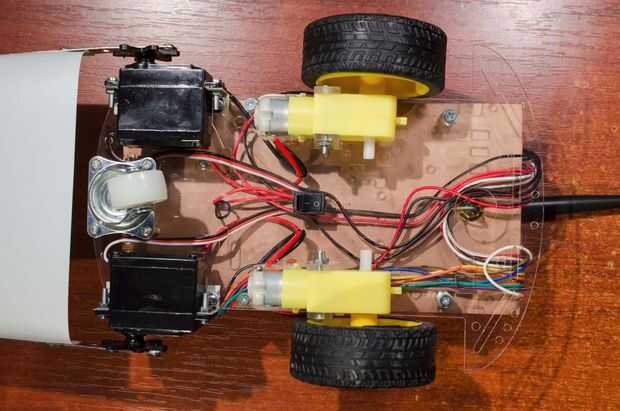
2. plataforma
Ambas plataformas fue adquirido como un kit e incluye el tablero de soporte plástico principal, dos ruedas impulsado por motores de DC (con bridas de fijación), una tercera rueda pasiva y un botón de encendido (también tenía un soporte de pilas cuatro pilas tamaño AA, pero no fue utilizado). La estructura de múltiples capas se obtuvo utilizando tablas de cooper PCB ordinario (debido a su disponibilidad, precio y uso adicional como un plano de tierra).
3. pantalla LCD
La HSD043I9W1-A de pantalla HannStar es una exhibición de color matriz activa thin film transistor (TFT) cristal líquido (LCD). Este módulo se compone de un panel TFT LCD, un circuito de conducción y un sistema de luz trasera. Este LCD de TFT tiene un área de pantalla activa de pulgadas medido diagonalmente 4.3 (16:9) con resolución WQVGA (480 por 272 píxel vertical horizontal). Datos RGB es introducidos a través del paralelo 24 bits (8 bits por color) y las señales sync (control) pueden ser ya sea a través de la sincronización Horizontal/Vertical Sync (según lo utilizado en el interfaz del VGA) o el uso de DataEnable/DataClock (donde DataEnable es alta cuando los contadores de la exhibición horizontal y vertical en la zona activa, con el DataClock a 10MHz). Fue rescatado de un navegador GPS defectuoso (como notado por su estructura de plástico marca), y porque tenía un cable de la flexión plana de bastante inaccesible 30 pines 0.5mm pitch, una placa de adaptador tuvo que ser construido para permitir el uso de un encabezado de echada de 2.54 milímetros más cómodo como un medio de conexión a la tarjeta FPGA.
4. termómetro
Este módulo también fue rescatado de un termómetro de oído de uso doméstico cuya pantalla agrietada. La falta de cualquier documentación de la interfaz de datos, combinado con el chip on board con sin marcas, dio lugar a una necesidad de protocolo manual decodificación. Por lo tanto, los siguientes datos pueden no ser únicos, ni la manera más eficiente para adquirir datos de temperatura, pero parece ser lo suficientemente estable como para este proyecto. A través del jefe de a bordo (con los pines marcados como "V D C G A") el microcontrolador/ASIC a bordo parece salida de los datos de unos SPI-como, con los siguientes pines:
- V = 3V3 VCC,
- D = datos en serie,
- C = reloj serial,
- G = masa,
- A = "acción" / esclavo seleccione (vinculado al botón de "Medida" del termómetro).
Además, una quinta parte perno tuvo que ser soldado (como se explica a continuación) al botón de "Menú". Este botón y la "medida" uno son activo bajo (cuando se presiona, tiran la señal a tierra).
La forma que el termómetro parece funcionar es la siguiente:
-El dispositivo es retirado de modo dormir tirando "Menú" hacia abajo, entrando en la oreja modo (este modo implica un rango de temperatura muy estrictas, 34 a 42 grados centígrados y un tiempo de calentamiento de 2 segundos, por lo tanto no es adecuado para una operación continua), de medición
-Para el tránsito al modo de medición de temperatura, "Menú" y "Medida" tienen que ser tirado por un segundo, libertad,
-Ahora, cada vez que la señal de "Medida" es baja, temperatura ambiente es medido (-20 a + 80 grados Celsius) y outputted vía el pin de "D", en sincronía con el reloj generado internamente del dispositivo disponible en el perno "C",
-Para obtener una lectura continua, la señal de "Medida" se tira baja y luego alta a una frecuencia de 5Hz, 50% duty ciclo (pruebas con una frecuencia más alta o más baja % ciclo de deber resultó demasiado rápido para el botón interno del dispositivo contra rebotes subcomponente, leyendo la entrada como una prensa continua, que se traduce en una falta de salida de datos). Una vez finalizada la medición, se leen los datos seriales genera en caer-borde del reloj.
Cada ciclo de medición salidas de una cadena de datos serial de 40 bits, compuesto por las siguientes palabras de 8 bits:
0x5B t1t2 t3t4 checksum 0x0D
Donde las palabras de 4 bits t1, t2, t3 y t4, cuando convierte de hexagonal a resultados de char en t1 = decenas de grados, t2 = grados, t3 = 1/10 grados, t4 = 1/100 grados Celsius. Suma es la suma binaria de los primeros 24 bits y 0x5B y 0x0D representan el inicio y el final de la secuencia de datos.
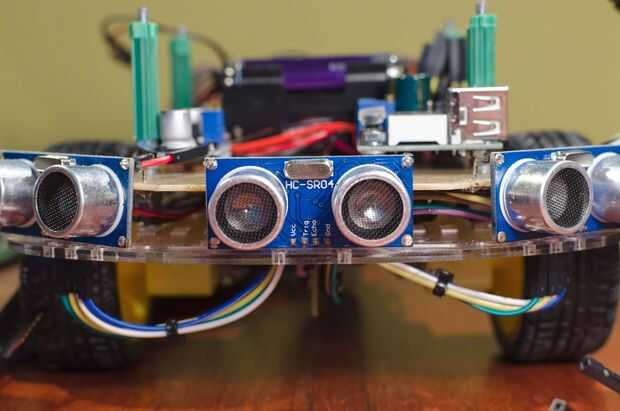
5. ultrasonidos
Los ultrasonidos HC-SR04 desde módulo proporciona función de medición sin contacto de 2cm - 400cm, con precisión de hasta 3mm. Los módulos incluye circuito transmisor, receptor y control ultrasónico. Para medir distancia, debía aplicarse el siguiente protocolo: pin «Desencadenante» se tira alto 10us (el módulo envía ocho 40 kHz), y después el módulo recibe la señal de pulsos hacia atrás, saca el pasador de "Eco" para un tiempo de 1uS por 58 centímetros en la distancia medida.
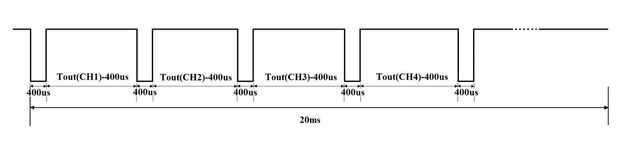
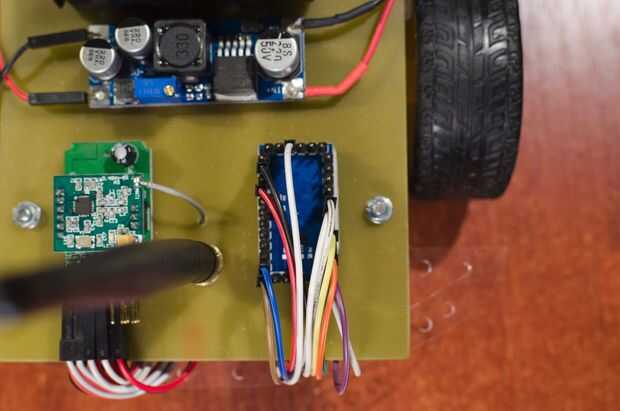
6. módulo transmisor de RF de
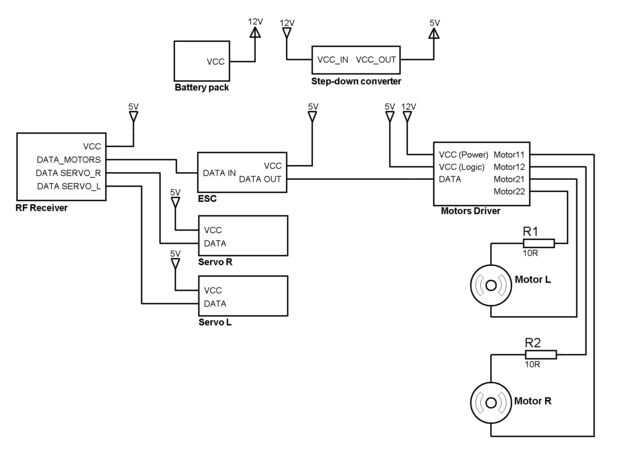
Estos módulos de 2,4 GHz RF fueron rescatados de un control remoto y seguir estándar 50Hz (y tiempo de alta de 1 a 2 ms) señales PWM en hobby-grado analógico controlado por motores y servomotores.
La parte del transmisor se recorte de la Junta de mando y remonta sólo a tres pernos (3V3 VCC, GND y datos). Protocolo del pin de datos ha sido decodificado y parece aceptar la siguiente secuencia serial: cada 20ms, un tren de pulso con pulso alto nivel cuatro (donde cada pulso corresponde a cada canal en el receptor, con su duración igual a la adición de 400 a la duración de pulso de la fuente), cada uno separado
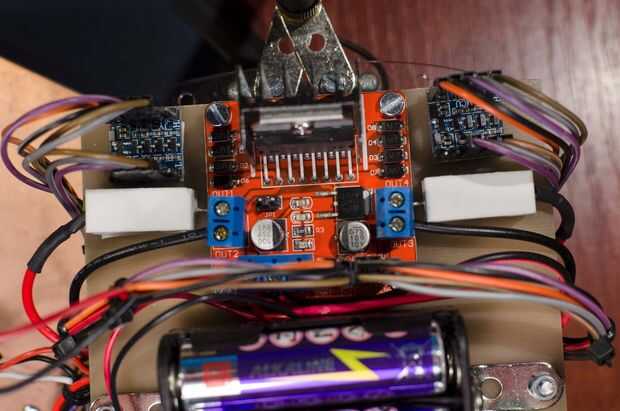
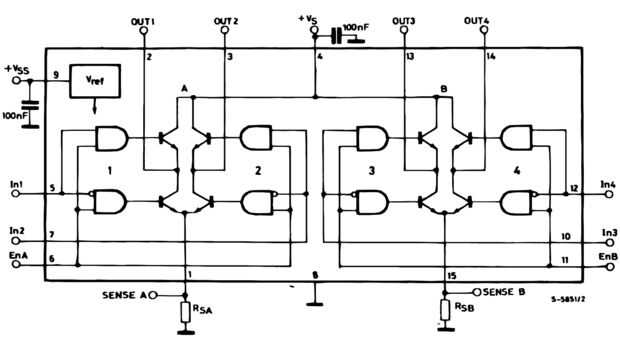
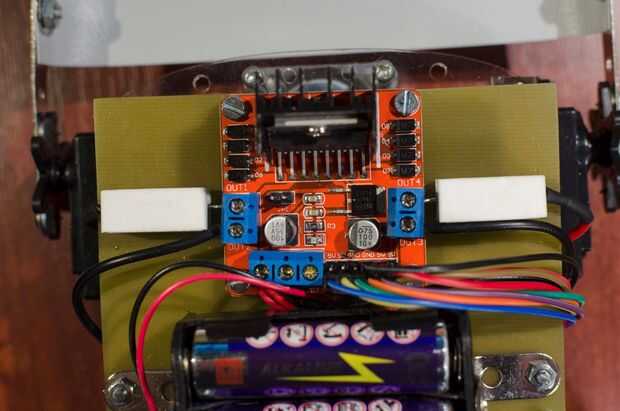
7. doble controlador de motores DC
Este controlador de motor dual bidireccional se basa en el L298 doble puente H Motor controlador de circuito integrado. El circuito permite el control del estado y la dirección de dos motores de 5V a 35V, hasta 2A cada (25W total máximo). Lógica es suministrada a un nivel de 5V e incluye un Enable, y dos señales de polaridad de la impulsión del motor de control (como se muestra en su esquema interno). 10 ohmios, resistencia de 5W potencia limita la corriente por el conductor sobre 1A, reduciendo el riesgo de agotamiento prematuro de la batería.
8. convertidor de nivel de lógica
JY-MCU es un 4-way bidireccional MOS FET basado en convertidor de nivel. El voltaje de referencia bajo nivel es suministrado por un regulador de voltaje interno 3c3, que a su vez se alimenta de la tensión de referencia de alto nivel (en este caso 5V).
9. codificador
Este componente es un estándar 24-pasos por revolución pasiva codificador rotatorio, utilizado para proporcionar el número de la rotación total o parcial de las ruedas, lo que permite una medición y control de distancia recorrida en el suelo por cada rueda.
10. fuente de alimentación de modo de conmutación Step-up
Accionado por un XLSemi XL6009 400kHz 60V 4A Boost DC-DC convertidor, este módulo provee el riel de voltaje 19V requiere para retroiluminación de LED de la pantalla, convertir desde el riel de 12V.
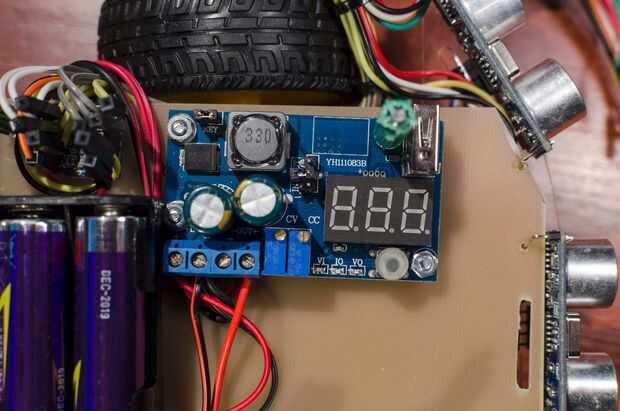
11. paso por cambiar la fuente de alimentación del modo
Accionado por un LM2596 TI 150 kHz 40V 3A convertidor DC-DC Buck, este módulo provee el riel de voltaje 5V necesarios para Nexys4 Junta, módulos de ultrasonido, lógica de conductor del motor y transmisor de RF, convertir desde el riel de 12V. Incorpora una pantalla de 7 segmentos, en la que muestra el voltaje de entrada o salido, o la corriente de salida (seleccionable mediante el botón de modo), que permite al usuario usar también en modo de corriente constante (además de la habitual tensión constante).
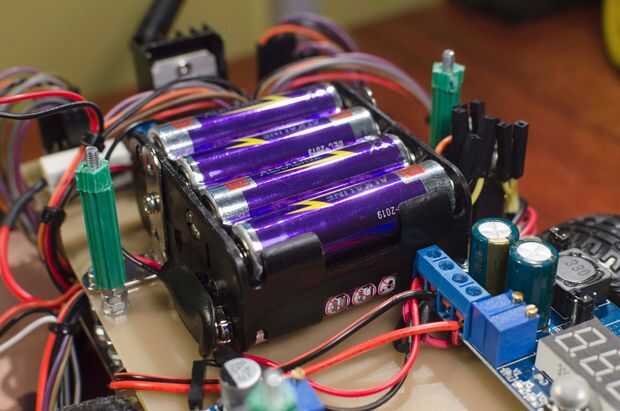
12. portapilas
Se trata de un soporte de batería estándar capaz de llevar ocho AA (R6) 1,5 v pilas alcalinas, suministrando el riel de 12V voltaje requerido por los dos convertidores DC-DC y el controlador de motor.
13. ESC
Este es un estándar, hobby-nivel, funciona con microcontrolador, ESC (control electrónico de velocidad) que convierten dos señales PWM de 50Hz (correspondiente al acelerador y dirección) en las seis señales necesarias para el conductor del motor. Que nos permite el simple puente H L298 para el receptor de RF de interfaz.
14. receptor
Este receptor convierte la señal recibida en cuatro canales separados, implementación de 50Hz, 1 a 2 ms hora de PWM.
15. servomotor
Este motor al mando PWM incorpora un circuito de realimentación analógica para mantener su posición incluso bajo carga y es 100% compatible y diseñado para el tipo de RF receptor/controlador que utiliza en este proyecto. Permite modificar el ángulo de la camilla improvisados en orden para recoger la "víctima".
16. descender conmutación modo de alimentación
Similar al convertidor buck en la otra plataforma, también utiliza el mismo LM2596 regulador, pero no incluyen una exhibición de corriente/voltaje, ni capacidad de limitación de corriente.
NUEVO: 17. Magnetómetro
Con el fin de eliminar la deriva mecánica mientras que la primera plataforma se mueve hacia adelante o hacia atrás y también permiten una medición precisa y el control del ángulo de rotación al tiempo que la plataforma gire a la izquierda, derecha o 180 grados, un magnetómetro de 3 ejes HMC5883L (o brújula digital) fue integrado en el diseño. Medir la fuerza del campo magnético en el eje X e Y, y aplicando una operación arctan2() (también conocido como arctan(x/y)), una dirección de norte magnético puede calcularse.

")

")




")
")

")

