Paso 4: Configurar el drone con tu PC
Puesto que hay muchas configuraciones diferentes, necesitará conectar el robot a su PC para configurarlo, pero no te preocupes, es súper fácil!
Lo primero que debe hacer una vez conectado será elegir una "X" o forma "+" en el controlador de vuelo dependiendo de lo que eligió y establece la rotación del motor de cada motor según el dibujo.
Software
Antes de explicar cómo configurar el controlador de vuelo según el tipo de marco, te voy a dar un breve recordatorio sobre softwares que tienes para descargar:
Dependiendo de su controlador de vuelo necesitarás descargar uno de estos programas, pero otra vez, te recomiendo que uses un Naze32:
Para Naze32: Cleanflight (Extensión para chrome) o BaseFlight (extensión de Chrome) o BetaFlight. Para conectar tu Naze32 a tu PC necesitarás un micro cable USB
De CC3D: OpenPilot (Asegúrese de descargar una versión de apoyo CC3D) La mayoría de CC3D tablero utilizan cables mini usb, pero los más nuevos podrían tener ranuras micro usb.
Driver: Para ambos controladores de vuelo, tendrás una necesidad al conductor que reconocerá la FC cuando se conecta a su PC, aquí está: USB controlador UART
Configuración
Ahora, voy a hacer un tutorial en Cleanflight, se asume que el controlador de vuelo es ya flasheado con la ultima versión de Cleanflight, si no cómo hacerlo, puedes leer mi anterior aquí instructivo donde se explica.
Una vez usted ha conectado su drone a su PC mediante el cable USB, abra CleanFlight y haga clic en "Conectar", luego la cabeza en la ficha "Configuración".
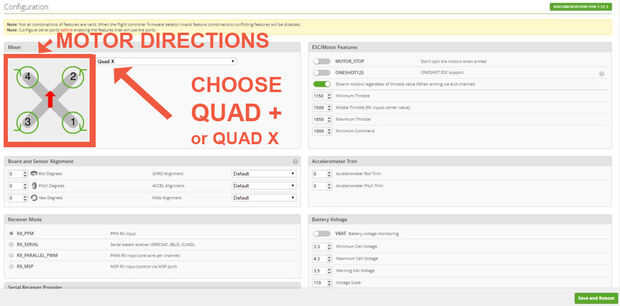
Ahora, en el área de "Mezclador", tendrás que elegir el tipo de trama de su abejón, elegir "Quad +" o "Cuatro X" dependiendo de cómo usted monta su abejón.
Esto es prácticamente lo único que tienes que hacer! :) También se puede ir más lejos en su configuración por templar su PID pero esto ya es un paso muy avanzado de configuración que no es obligatorio que en todo.
Una vez hayas seleccionado la forma del marco, un esquema, se mostrará el sentido de giro de cada motor, asegúrese de que todos sus motores giren en la dirección correcta, ahora voy a explicar como comprobar esto.
Sentido de rotación del motor
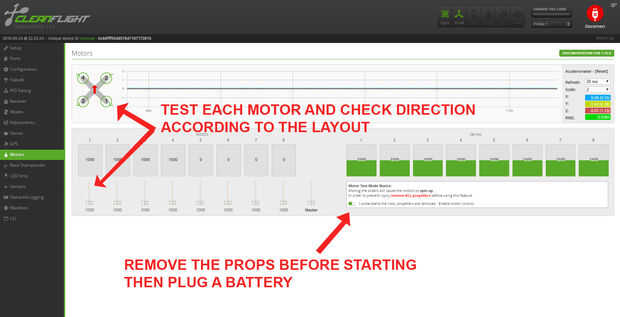
Antes de probar un motor, Hacer seguro que los propulsores se quitan.
Hélices de SPINING pueden ser muy peligrosos así que asegúrese de que ha eliminado antes de este paso.
Para probar el sentido de giro de un motor, cabezal en la pestaña de "Motores", conecte una batería en su abejón y probar cada motor moviendo la perilla pequeña y compruebe si el giro de cada motor es el mismo que el que está en el diagrama y no se invierte.
Si algunos motores giran en la dirección equivocada, sólo tenga en cuenta su número por lo que podremos cambiar esta programación la ESC.
Asegúrese de tener su poiting cuádruple en la dirección correcta (la nariz hacia adelante) cuando pruebas cada uno del motor y además se nota que si han invertido motor, no cambia. Lo importante es en la dirección que cada tirada de motor cuando se mira desde la parte superior del robot, no importa de que manera se montan los motores.
Programación de los CES.
Para este paso, usted necesitará descargar Suite de Heli BL.
Programación de la ESC le permitirá cambiar fácilmente el sentido de giro de un motor.
Si usted tiene un Naze32 como yo, no necesita cables especiales de programación! simplemente enchufe el FC con el cable USB, abrir BL Heli Suite y en la pestaña de "Select ATMEL/SILABS interface", elegir "SILABS BLHeLi bootloader (CleanFlight). Luego simplemente haga clic en conectar y usted será bueno para ir!
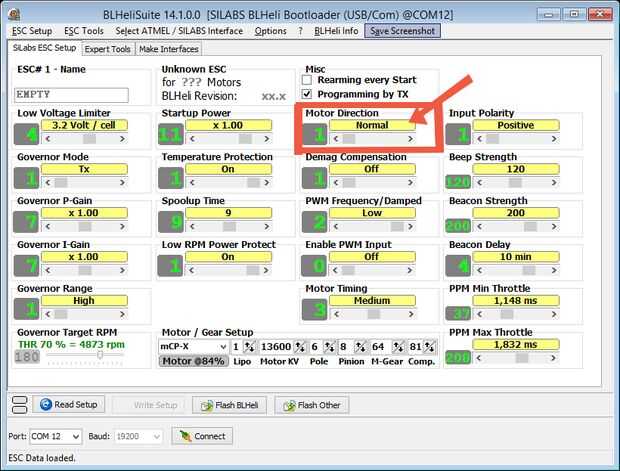
Como dije, programación de la ESC es útil para revertir una dirección del motor sin tener que cambiar el cable ya soldado entre el ESC y el motor.
Para ello, sólo tienes que seleccionar el motor que desea programar por quitar todos los demás en los cuadritos en la parte inferior de la pantalla. Luego, en el área "Dirección de Motor", elegir "Invertido" en lugar de "normal".
Si desea más información sobre la programación del ESC, hay muchos tutoriales aquí.
Configuración final
Ahora, volvamos a CleanFlight para los pasos finales de la configuración. Paso de la tesis dependerá de sus preferencias personales pero aquí hay algunas recomendaciones.
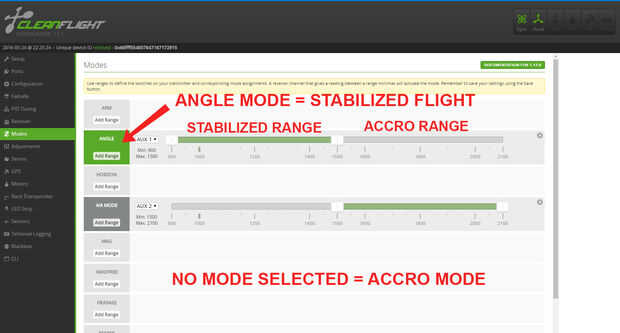
Puede ser útil programar algunos modos de vuelo, de forma predeterminada, el Naze32 en cleanflight está en modo de accro, añadiendo así un modo estabilizado (ángulo u horizonte) para el despegue o aterrizajes pueden ser útiles.
También decidí añadir un modo de aire, pero usted podría elegir armar su robot con un interruptor por ejemplo.
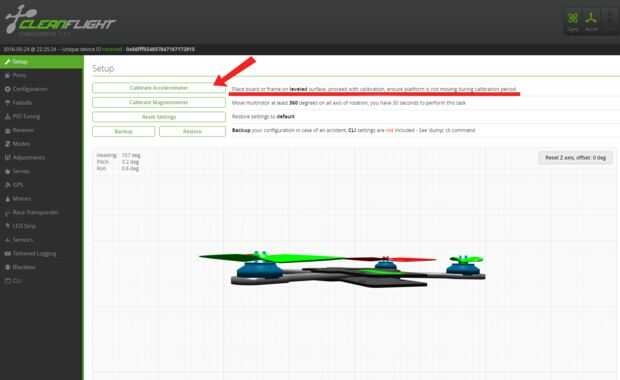
Finalmente, una vez hecha su configuración, diríjase a la pestaña principal y calibrar el acelerómetro colocando el quadcopter sobre una superficie plana y presionar "Calibrar acelerómetro".













