Paso 2: Python instalación y robot base configuración
Hay un montón de información sobre configuración y configurar su imagen de Raspbian aquí
Python está preinstalado, pero podemos comprobar la versión de Python usando el terminal para verificar.
Copiar y pegar en la LXterm
Python - versión
Para los ejemplos que vamos a repasar es aconsejable utilizar Python versión 2.6.
Si no está instalado Python en tu sistema que puede utilizar apt-get concedida que el Raspberry Pi está conectado a Internet.* **
Copiar y pegar en la LXterm
sudo apt-get install python2.6
También para los ejemplos de este tutorial necesitamos instalar algunos de los las bibliotecas dependientes de nuestros scripts trabajar.
Copiar pegar en el LXterm
sudo Apto-conseguir instalar python-serial
También usted puede o no tener que ajustar salida de la frambuesa Pi en el conector de audio 3.5 con la línea de comandos
Copiar pegar en el LXterm
amixer cset numid = 3 1
Luego descargar los archivos de sonido a continuación añada una carpeta llamada suena a "/home/pi" y añadir los archivos .wav a ella (ej. /home/pi/Sounds/forward.wav)
A continuación descarga y añadir la siguiente secuencia de comandos de Python a "/ home/pi"
Ahora tenemos que hacer el python script ejecutable con el comando chmod
Copiar y pegar en LXterm
sudo chmod + x /home/pi/zagbot-bt.py
El programa ahora debe ser ejecutable. A continuación descarga y sube el siguiente bosquejo con el IDE de Arduino 1.0.4 o superior te Arduino Uno.
Esquema Base de Arduino Robot
zagbotbt.ino
Si no está familiarizado con Arduino y su IDE puede leer para arriba en él aquí.
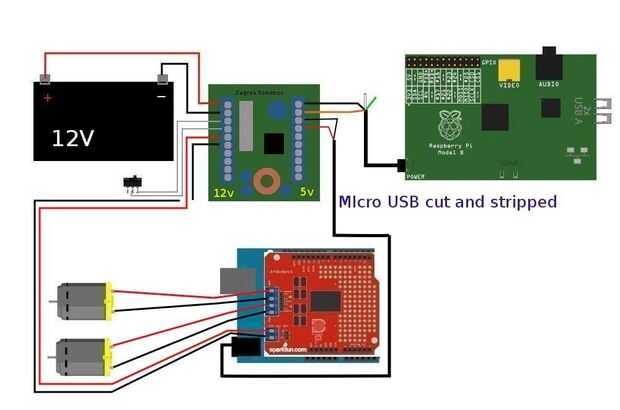
Y por último se refieren al esquema anteriormente para configurar las conexiones a la base del robot.







")





")