Paso 3: montaje






El robot de música se ve bastante grande en el exterior, sin embargo, los altavoces toman mucho espacio. Por eso un Raspberry Pi a + se ha utilizado para esta construcción, que encaja perfectamente. En el futuro, podría decidir utilizar el Raspberry Pi para otro proyecto, así que todas las conexiones se hacen mediante conectores regulares. La salida del auricular está conectada a la entrada de audio de la Andrew KNG (o cualquier otro conjunto de altavoces amplificados). Para ello, utilicé un cable macho a macho de 3,5 mm corto y cortar uno de los conectores. Se conectan los cables en el cable al conector de entrada audio (negro es tierra, blanco canal izquierdo, rojo canal derecho). Tenga en cuenta que la punta es el canal izquierdo, el centro del canal derecho y el último uno es la tierra.
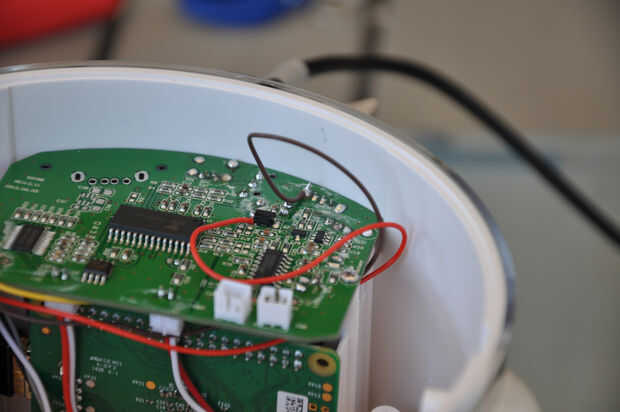
Un micro-USB muy corto al cable del USB proporciona alimentación a la frambuesa Pi. Con un cuchillo afilado, corté abierto el conector USB normal, por lo que he podido conectar los cables a los pines de alimentación. Como el Andrew KNG es alimentado a través de un regular (mini-) conector USB, es muy simple encontrar un + 5V y GND en el PCB de Andrew interna de KNG.
No había espacio suficiente en el vientre del robot música simplemente conectar los conectores de audio y de alimentación. Por lo tanto, dos orificios en la parte superior deben arreglar este problema (para que el resto del cable se termina en la cabeza del robot). Utilizando un marcador permanente para indicar los lugares exactos para los agujeros, hechos fáciles de perforar. Como no quería hacer el agujero demasiado grande, comencé con una broca pequeña y utiliza brocas mayores hasta que el agujero fue lo suficientemente grande.
El lector de RFID es pegar con una pistola de pegamento. Tenga en cuenta que la cabecera se suelda en la parte posterior del lector. Esto hace posible poner al lector lo más cercano al exterior como sea posible. Luego, conecte los cables con cinta de Dupont para el lector y los otros extremos a la frambuesa Pi. Últimos pasos están pegando el Raspberry Pi en lugar, conectar los conectores de audio y de alimentación y cerrar el caso!
")

![Sistema de autenticación Smart [Intel IoT] basado en RFID](https://foto.askix.com/thumb/170x110/2/c8/2c82152bef683471b2f395c417079829.jpg "Sistema de autenticación Smart [Intel IoT] basado en RFID")










