Paso 2: Vamos a ver en el uso de la Pi para obtener una lectura del Sensor de ultrasonidos
Aprendí a hacerlo mediante el tutorial de ModMyPi.com que está disponible aquí:
https://www.modmypi.com/blog/HC-sr04-Ultrasonic-RA...
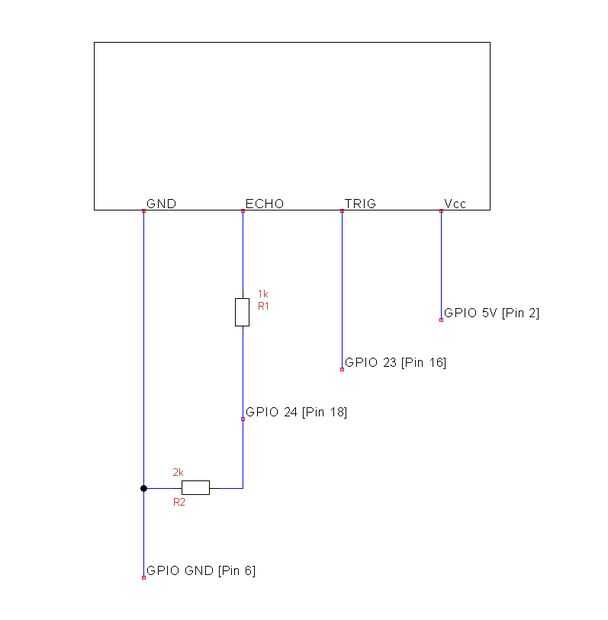
Hay un esquema que muestra cómo aplicar el divisor de tensión.
Brevemente, se utiliza para soltar la tensión en la señal del pin eco en el sensor. 5V el pasador de las hojas y pasa por una resistencia que crea una caída de tensión. En este punto, hay una división: una rama va a GND mediante un resistor que quita dos veces más voltaje - la otra rama ha ido sólo a través de una de estas resistencias y tan sólo reduce el voltaje a 3.3V.
El Pi debe esta señal para reducirse a 3, 3V el sensor de los E.E.U.U. funciona pero volverá lecturas falsas. Por lo tanto la necesidad del divisor de tensión.
Puede consultar el enlace adjunto si usted necesita este protoboard. (Más tarde) he adjuntado algunos archivos de fabricación para la producción de un pequeño divisor de tensión si tienes las capacidades para ello.
Para probar el sensor ultrasónico se puede utilizar el código adjunto (si no funciona de mi imagen disponible en Github). Para ello, simplemente descargue el archivo y en LXTerminal en el RPi, desplácese a la carpeta donde has descargado el archivo. Escriba "sudo python FILENAME.py".
![R2-D2 [R2] (ATtiny2313 pared evitando Robot)](https://foto.askix.com/thumb/170x110/d/5d/d5d79e70aced7f4a772d55b7fd829ee7.jpg "R2-D2 [R2] (ATtiny2313 pared evitando Robot)")










 - neurálgico Fablab")

