Paso 4: Ahora Haz esta cosa para trabajar!
Inglés
Ahora viene la parte más difícil para mí: programación.
Hemos hecho las primeras pruebas con los motores, utilizando este tutorial, haciendo los ajustes necesarios sobre el pinout de mis motores.
La idea que tenemos es el siguiente:
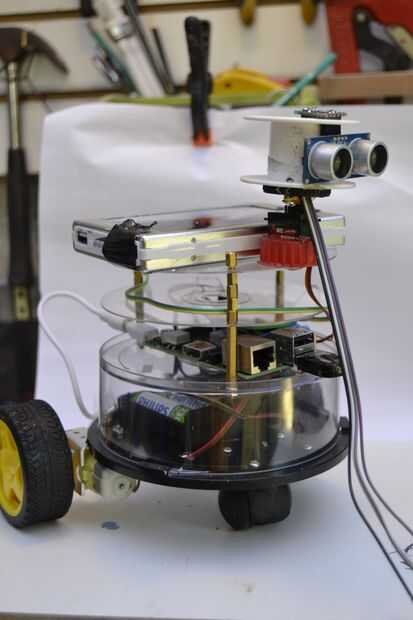
- El robot se mueve hacia adelante hasta que encuentra un obstáculo a 30 cm (usando el sensor de ultrasonidos).
- Se reduce la velocidad a la mitad y comienza a mirar alrededor (se mueve el motor servo).
- La búsqueda de la manera más libre (con ningún obstáculo u obstáculo más distante), convierte el cuerpo del robot y se reinicia el bucle.
He estado estudiando cómo haría en cero utilizando GPIO siguiendo estos tutoriales http://cymplecy.wordpress.com/scratchgpio/scratch-raspberrypi-gpio/
Después encontré a Wyliodrin y también me parecía bastante interesante.
Finalmente, siempre es bueno Python viejo.
Seguimos...
Portugués
Vem Agora una parte mais desafiadora para mim: programação.
Nós já fizemos os primeiros testículos com os motores, usando esse tutorial, haciendo como devidas adaptações referentes à pinagem dos meus motores.
A idéia temos é a seguinte:
- O robô se mueva para frente até encontrar um divisará un dele de 30 cm (usando o sensor ultrasonico).
- Ele reduz sua velocidad à metade e começa a olhar para os lados (movimentos hacer motor servo).
- Procura o caminho mais el livre (com divisará mais distante ou nenhum comienza), gira o corpo do loop de robô e reinicia o.
Em de fazer seria Estive estudando como cero, usando GPIO seguindo esses tutoriais http://cymplecy.wordpress.com/scratchgpio/scratch-raspberrypi-gpio/
Depois UE acabei descobrindo o Wyliodrin e también me pareceu bastante interessante.
Por fim, sempre resta o bom e velho Python.
Seguimos...

")









