Paso 5: Secuencia para empezar
Primero Haz tu trabajo de montar en protoboard.
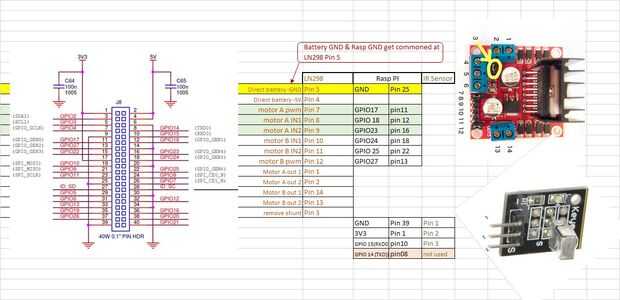
Consulte el esquema adjunto que preparé. Esto tiene todos los pin conexión detalles frambuesa PI, Sensor del IR, regulador del motor de LN298.
Comenzar con mando a distancia IR primero. Compruebe si puede presionar teclas remotas y el código de Python en Raspberry PI.
Una vez empezar a trabajar comienzo prueba el regulador del motor. Le Monte motor del coche de DIY. He utilizado un coche con 2 motores. Coches hay 4, así como en los mercados en línea. Si usas plan de un seno de energía de la batería mejor necesite más energía.
Una vez que el auto es ensamblado Compruebe si el motor y las ruedas móvil dando 5Vs a motor.
A continuación, conecte el regulador del motor de LN298 a Raspberry PI.
Para la prueba y problemas disparos de PWM out te pone podría simple LED con Resistor conectado paralelamente a las salidas PWM. Si usted está interesado más análisis PWM y otro GPIO salidas que puede intentar usar analizadores de lógica del USB. Hay bajo costo USB analizador de dispositivos lógicos (24Mhz) se pueden comprar en línea. Usé uno y software instalado en mi portátil. Software también puede descargar de internet. Es una herramienta de depuración muy útil para tener.
Códigos de Python;
Impulsar
DEF movefront():
# motor1
my_pwm = GPIO. PWM(11,160) # frecuencia determinada GPIO. PWM(PIN,Frequency)
my_pwm.Start(50)
my_pwm. ChangeDutyCycle(75)
GPIO.output(12,0)
GPIO.output(16,1)
# motor2
pwm2 = GPIO. PWM(13,160) # frecuencia determinada GPIO. PWM(PIN,Frequency)
pwm2.Start(50)
pwm2. ChangeDutyCycle(75)
GPIO.output(18,0)
GPIO.output(22,1)
Time.Sleep(2) # dejarlo mover durante 2 segundos
pwm2.STOP()
Gire a la izquierda
DEF leftturn():
# motor1
my_pwm = GPIO. PWM(11,160) # frecuencia determinada GPIO. PWM(PIN,Frequency)
my_pwm.Start(50)
my_pwm. ChangeDutyCycle(75)
GPIO.output(12,0)
GPIO.output(16,1)
Time.Sleep(0.5) # dejarlo durante 0,5 segundos
my_pwm.STOP()
Una vez que funciona en protoboard mover frambuesa PI, sensor IR, LN298 el controlador del motor, batería en el coche y arreglarlo.
# Programa principal
para que en range(0,500): lazo # ejecutar para 500 veces
Estado = getKey_IR()
Si estado == "up": movefront()
Si estado == "hacia abajo": reverse()
Si estado == «izquierda»: leftturn()
Si estado == "derecha": rightturn()
Si estado == "vol up": topgear()
Si estado == "poder": os.system ('apagado ahora -h')
GPIO.cleanup()

")











