Paso 4: Inicio positivo a través de un detector óptico ranura en una entrada. (y convertidor de nivel de lógica)
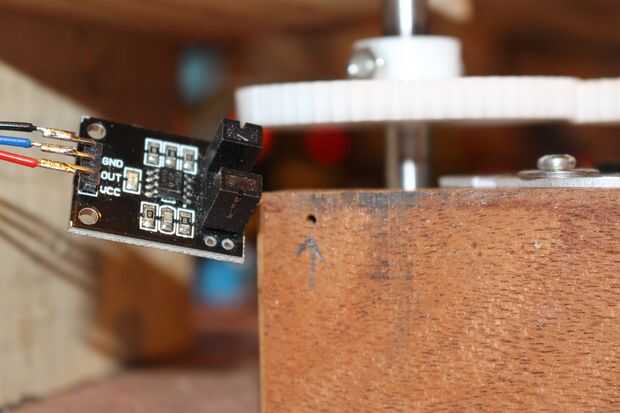



Para permitir que este lapso de tiempo trabajar bien y constantemente necesita para asegurarse de que el giradiscos comienza siempre en el mismo punto. para ello he usado un detector de ranura. Este dispositivo tiene un diodo IR de un lado y un detector en el otro lado, cuando algo entra en la ranura y oscurece el espacio tienes un cambio de salida. Esto se utilizará como un indicador del parque. Al final de cada secuencia de la imagen dirán el motor para dar un paso atrás y luego cada vez que la ranura se comprobará. Cuando la ranura se interrumpe entonces el motor avanzará a la posición inicial.
Hubo un pequeño problema con este dispositivo. no como funcionar con 3 voltios la Raspberry PI, así que para que funcione correctamente tuve que usar un convertidor nivel lógica esto permite que el sensor de 5 voltios y dar una lógica de 5 voltios que se convierte entonces en un nivel de lógica de 3 voltios por el convertidor. ¿Esto protege la forma PI frambuesa el nivel de lógica de 5 voltios que podría matar el GPIO?
El convertidor de nivel de lógica es fácil de usar, tiene un regulador de 3 voltios así que necesita un suministro voltios 5 y GND. entonces usted sólo alimentación lógica de 5 voltios en un lado y obtener lógica 3 voltios el otro. o viceversa. el que ves en la foto tiene 4 canales solo estoy usando uno.




")


")



