Paso 3: Conectar el motor paso a paso


OK por lo que debe tener un motor que se ve algo como la imagen... Primero poner la polea en hacer que el prisionero se aprieta en la parte plana del eje.
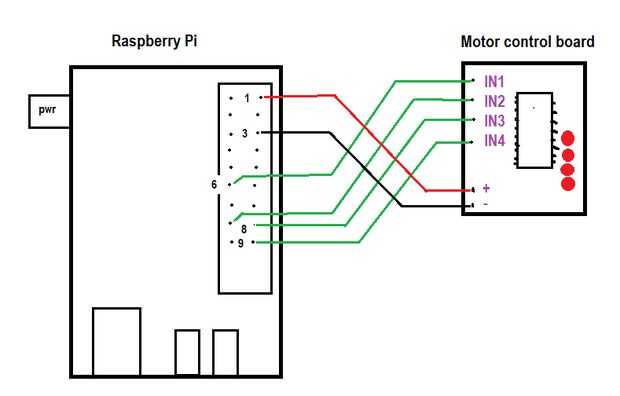
Primero conectar el motor a la Junta de control este es el cable con punta blanco y sólo va en un sentido. A continuación tome la conduce a hembra para conectar el tablero de control del motor a su Pi. Yo he dibujado cómo hacerlo con un Raspberry Pi B + basado en la siguiente URL:
http://www.raspberrypi-Spy.co.uk/2012/07/stepper-m...
una vez que está conectado utiliza WinSCP para cargar el siguiente script en el pi como stepper.py
dos líneas importantes, se puede jugar con una vez que la plataforma está trabajando es esta:
para x en el rango (1, 200):
que dice el guión cuantas veces tomar una imagen y movimiento y éste:
para x en el rango (0, 2000):
que dice la escritura de tiempo entre imágenes. 2000 resulta ser unos 52 segundos
También si tienes una tarjeta microSD grande puede aumentar la resolución de tus fotos individuales. Usted puede hacer esto añadiendo la línea "camera.resolution = (2592,1944)"inmediatamente antes de la línea que dice"camera.capture(nextpicname)" . Es la máxima resolución para que llenará el espacio rápido (200 pics es aproximadamente 430Mb o posiblemente más) pero también puedes probar las resoluciones inferiores.










")


