Paso 4: Realizar y ensayar
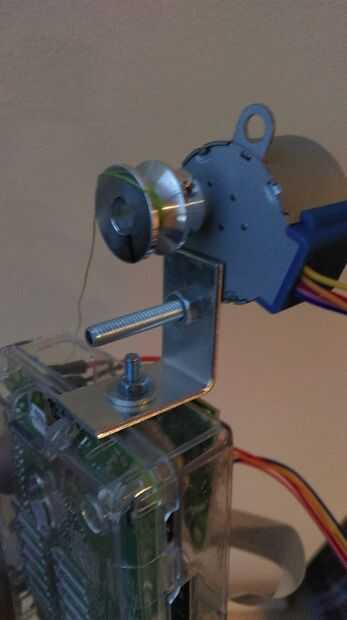
a continuación se que necesita conectar el motor paso a paso con el caso. Me perforó un agujero en mi caso de pi y empernada en la escuadra. A continuación atornillados en el motor al otro extremo de la escuadra. El motor ahora está en un extremo de la caja de pi con el eje paralelo con el borde superior como en la foto.
ahora la cadena encima de la línea de lavado en un lugar adecuado para una prueba de como a través de una habitación. He encontrado que el mejor tipo de línea es una con un recubrimiento plástico y no demasiado empinada para que la plataforma puede rodar a lo largo de él. Luego enganchar la polea sobre la línea por lo que parece de un coche de cable. El pi entero y la plataforma deben estar ahora en la línea. Recuerde que la polea va hacia la derecha por defecto así que tener en cuenta que al planificar que forma la plataforma viajará.
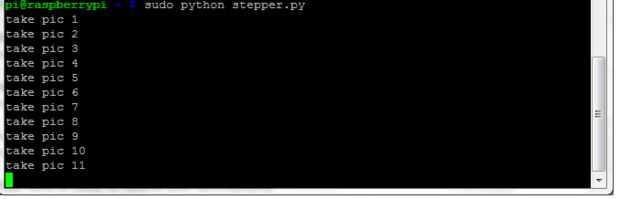
Ahora conecta el poder a usted pi y lo arranque. El cable adaptador USB y toma de corriente debe ser libre de conectar con el pi para toda. A continuación, conecte a su pi con putty y WinSCP. en el tipo de terminal (a través de la masilla) en sudo python stepper.py. el script debe empezar y tras una breve pausa de impresión "tomar pic1" a la línea de comandos. Entonces el motor debe patear y mover el pi a lo largo de la línea una distancia muy corta. Es casi imperceptible por lo que será más evidente si se está moviendo (o no) después de algunos ciclos. A través de la masilla debe mirar como el cuadro después de un tiempo.
Después de la secuencia de comandos completa o crees que se toman suficientes imágenes puede detener la secuencia de comandos con ctrl + c y luego descargar las fotos de su Pi a tu laptop o PC con WinSCP. Se numeran en orden.










")


