Paso 4: Tutoriales ROS
Con roscore en un terminal abierto otra terminal y copiar y pegar
rosrun roscpp_tutorials hablador
Esto debería empezar a publicar algo como esto
[INFO] [1358365440.794845809]: Hola mundo 0
[INFO] [1358365440.895024702]: Hola mundo 1
[INFO] [1358365440.995006238]: Hola mundo 2
[INFO] [1358365441.095000473]: Hola mundo 3
[INFO] [1358365441.195000082]: Hola mundo 4
Luego abrir otro terminal y copiar y pegar
rosrun roscpp_tutorials oyente
Esto debe de salida los mismos datos que muestra el primer terminal
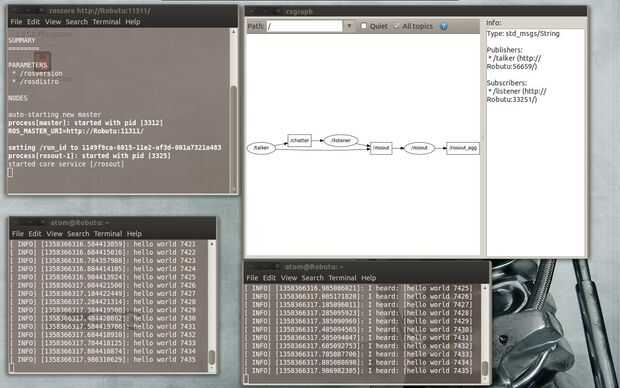
Ahora vamos a tener una idea de lo que está sucediendo dentro de la roscore mediante el uso de rxgraph para mostrar los nodos y los mensajes que se están ejecutando en nuestro sistema. Abrir una nueva terminal entonces copiar y pegar
rxgraph
Ahora debe ver los nodos de corrientes y sus respectivos mensajes con flechas a punto ahi orientación de salida, si seleccionas todos los temas en la ventana que puedes ver todos los temas que son publicados y suscrito dentro de lo roscore.
Para más ROS tutoriales podéis consultar la página de Tutoriales de ROS .
.")






")





")