http://www.youtube.com/watch?v=f7oSqLO9iJo
Este es un pequeño proyecto que hice para un colega que está construyendo un modelo a escala 1/48 RC de una clase de Fletcher destructor (sí... que hace que el "modelo" de 8 pies de largo!) Preguntó si podía animar el 5 x MKIII 5 "/ 38 arma torrecillas, completas con cojinete y elevación y también poder individualmente control, o control en grupos seleccionables, según lo real.
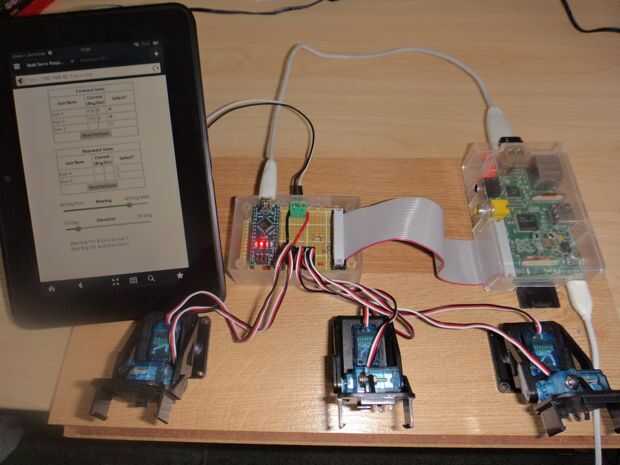
Así que después de 3 días de investigación, pruebas y puesta a punto, tengo: 1 x frambuesa Pi (B), funcionando como un WAP apache, php, python + CGI soporte 1 x Arduino Nano, recibiendo datos de los pernos de frambuesa comms serial, 3 unidades de pan/tilt que representan los 3 x fwd torretas 1 x interfaz web donde puedo configurar el cojinete y elevación de cualquier pistola solicitada (o armas) y un botón "ir".. .y con mi Kindle para controlarlos.
Estoy pasando el número de armas, rodamiento y elevación como conseguir solicitud de variables, usando un script en python CGI para conseguir esas variables y enviarlos a arduino.
El video muestra los servos que se mover a toda velocidad, pero desde entonces han cambiado de la librería de arduino servo.h a la biblioteca de VarSpeedServo.h y puede ajustar la velocidad a algo un poco más realista. También hace los servos parecen moverse juntos en lugar de secuencialmente.
Tengo también (ya que el video) compuesto por un circuito apropiado para dar cabida a un conector de 26 pines para el cable de cinta frambuesa, un divisor de voltaje básico para un convertidor de nivel de lógica, encabezado y cabezales para conectar el nano en pasadores para las conexiones de servo. También parece que han limpiado un montón de la inquietud de servo que me metía.
[Editar] - por petición popular... (ambos)... Ahora he escrito más completo instructivo... así que aquí vamos
 actualizado Nov de 2015")




 en la nube")

 a ThingSpeak con un Arduino, mediante cable o WiFi (ESP8266)")



![Mostrar datos en un sitio web - olla electrónica [Arduino Nano + Ethernet Shield]](https://foto.askix.com/thumb/170x110/6/5d/65d8cdd6f7835b48d99fa83b376b85ec.jpg "Mostrar datos en un sitio web - olla electrónica [Arduino Nano + Ethernet Shield]")
")
