Paso 3: Cableado las piezas juntos
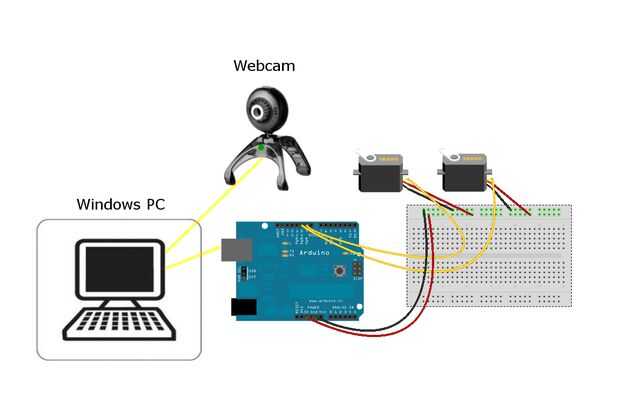
SERVOS
El cable de señal de amarillo para el pan (eje X) servo va al pin digital 9.
El cable de señal de amarillo para el servo tilt (eje y) va al pin digital 10.
Los cables rojo/Vcc de ambos servos van al pin de 5V de Arduino.
Los cables negro/GND de ambos servos ir al pin GND de Arduino.
WEBCAM
USB de la webcam va a la PC. El código C++ identifican mediante un número que representa la USB puerto su conectado a. .
ARDUINO
Arduino Uno es conectado al PC vía USB. Tome nota del puerto COM a que del USB está conectado. Usted puede encontrar el puerto com en el menú Herramientas/serie puertos de Arduino. Usted verá una marca de verificación al lado del puerto USB activo. Este es el puerto com que utilizará en el código de C++ para comunicarse con Arduino.
De se debe cambiar el código de C++ para que coincida con la tasa de puerto y baudios de com de la PC con Arduino. Además, el código de C++ debe saber que puerto USB es usando la cámara web.









")


")
