Paso 7: Servo Pan/Tilt Hack

Vamos a comenzar en el hack de servo. En este paso vamos a hacer una base para el sensor Ping, que podemos girar.
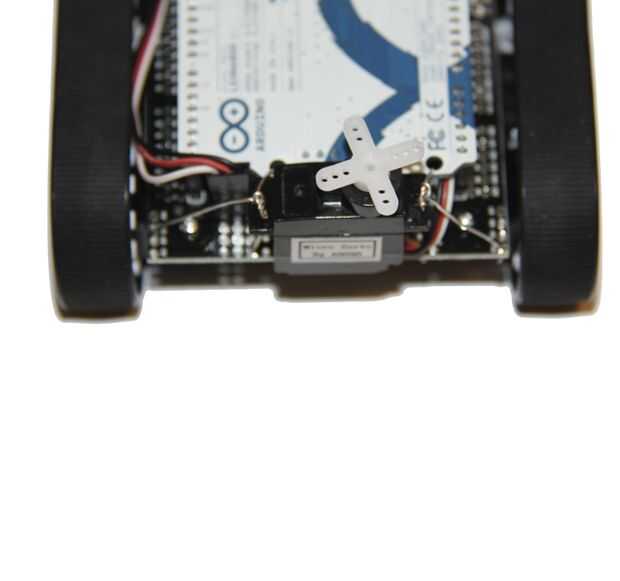
- Sacar su pequeño servo y puesto que en la parte superior del frente del chasis ZumoBot, con el Arduino Leonardo conectado al revés.
- Prueba y el servo, el centro también.
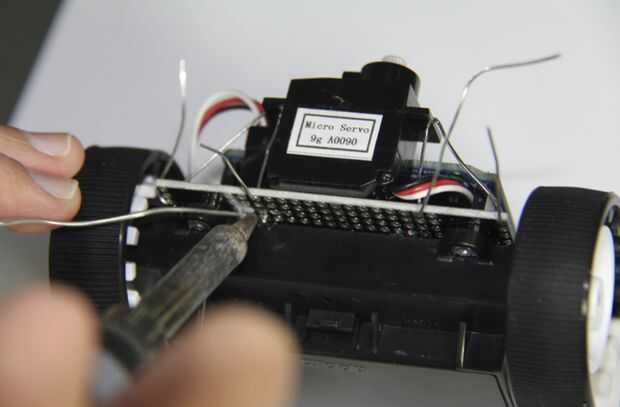
- A continuación, tome el cable extra y corte cuatro segmentos, dos largos (~ 4 pulg.) y dos cortas (~ 2 adentro.). Tome todo el aislamiento plástico fuera de ellos.
- Alicate para doblar los cables en forma de montaña.
- Ponga un extremo del alambre en la tierra (cojines cuadrados) en el borde, a través del orificio del servo y entonces en la tierra (cojines cuadrados) en la parte frontal del escudo de Zumo.
- En la parte posterior del PCB, doblar las puntas hacia afuera, para que no caigan hacia fuera.
- Repita este proceso para el otro lado del servo.
- Introduzca el encabezado macho de 3 pines pins de cabecera del servo.
- Envuelva el servo a través del cable que nos acaba de poner en, alrededor de los puentes y en el condensador.
- Poner a la Arduino Leonardo en el escudo de Zumo y luego Envuelva el resto del cable del servo por el Arduino.
- Poner la cabecera de macho en el cable de servo en D5, 5V y GND en el escudo de Zumo. Asegúrese de que están poniendo en los pines de la derecha!!!!!!
- La soldadura de los pines en el escudo de Zumo. Sí, eventualmente se quemará el plástico tratando de llegar a las juntas de soldaduras, y no es malo. Sólo es malo después de grabar > en 0,5. : D
- Recortar las puntas con su cortador diagonal.
- Poner la "X" en forma de cabeza de servo en el servo y poner el tornillo que viene con el servo en la parte superior. Con el destornillador Phillips, enroscar.
Ahora eres sólo un paso de máxima genialidad!!!!!! ¡ Mira cómo acoplar el sensor Ping a continuación!
