Paso 8: Sensor Ping Hack


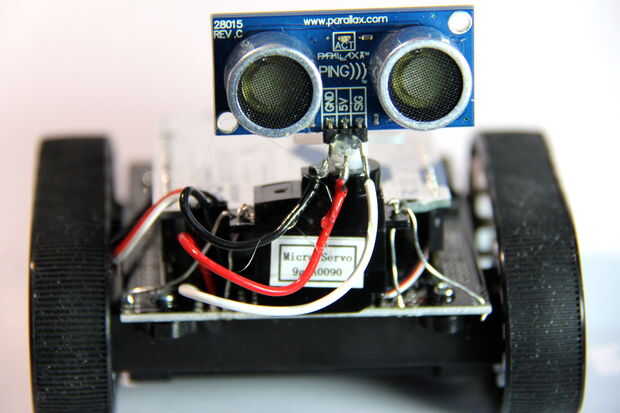



En este siguiente paso, vamos a poner el sensor ultrasónico Ping de Parallax en el servo y adjuntarlo a nuestro Arduino.
- Saque el sensor Ping y retire la espuma (si hay alguno).
- Doblar las puntas hacia afuera.
- Girar el servo en cuanto se pueda hacia la derecha. Si no continuar, dejar (accidentalmente rompí mina porque había convertido demasiado).
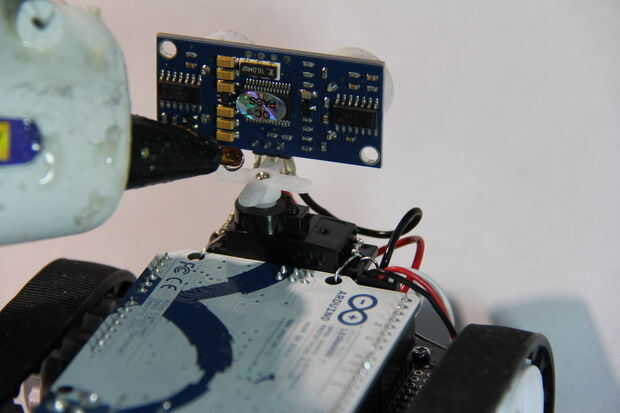
- Poner el sensor Ping en el segundo agujero en el segmento de la mitad izquierdo de la cabeza del servo.
- Corte algunos más alambre, esta vez tres largos los cables (~ 5-6 in.).
- Tira de ~.05in. de cada extremo de cada cable.
- La punta de cada alambre en un lado de la lata.
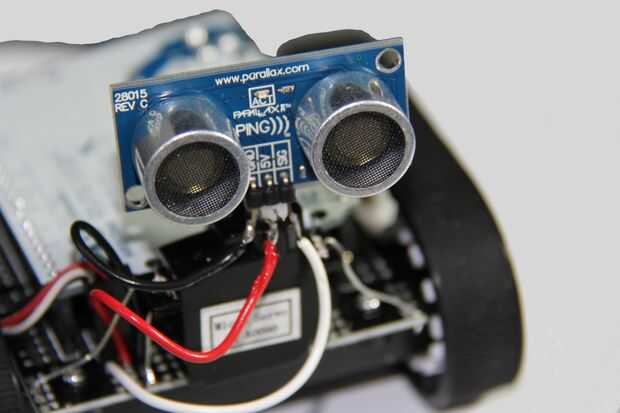
- Recalentar la soldadura y soldar cada cable a un pin del sensor Ping.
- La soldadura de los pines del sensor Ping: 5V a 5V, GND a GND, SIG a D4. Estos pernos deben ser justo por debajo de los pernos de servo.
- Recortar las puntas con su cortador diagonal.
- Calienta la pistola de pegamento caliente.
- Cuando esté listo, pegamento caliente la parte delantera de la cabeza del servo para el sensor Ping en la parte superior e inferior.
- También, pegamento caliente el sensor Ping a la parte posterior de la cabeza del servo.
- Cortar alambre aún más, esta vez dos cables (~ 4 pulg.) de largo
- La tira de plástico aislante de los cables.
- A continuación, poner una tonelada de pegamento caliente en la parte posterior de la batería y poner los extremos de los cables ahí.
- Mantener los cables allí durante aproximadamente medio minuto y luego suelte.
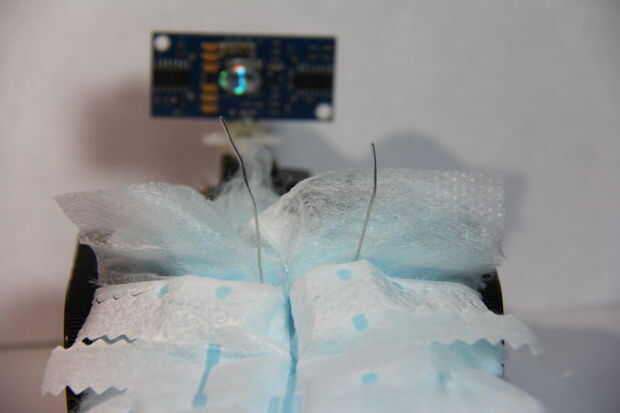
- Saque su Swiffer Duster Refill.
- Meter los dos cables de la parte posterior de la FuzzBot en el extremo del plumero Swiffer. Asegúrese de empujar a través de espesor mediano, tela gruesa no y no pelusa, pero en el medio.
- Tuerza los alambres dos veces.
- Doblar los cables en la cañería de la pelusa, para que no poke alguien al intentar recogerlo.
Usted está finalmente terminado con el montaje de tu FuzzBot!!! En la codificación...
