Paso 1: Descripción funcional
Como dije antes, este proyecto está actualmente en desarrollo, pero hemos hecho un prototipo funcional y seguro que se puede recrear y prueba con éxito en casa. Mantener un ojo para las actualizaciones que vendrán como evoluciona el proyecto.
Motores
Los motores son impulsados utilizando una señal PWM generada en FPGA; la velocidad de los motores es proporcional al valor PWM.
Cada uno de ellos posee un codificador de pasillo con 2 sensores de desplazamiento de fase de 90 grados. Cada vez que se detecta un roation completa, se encuentra un poco, contando lo fpga que una rueda completamente o viajó aprox. 19 cm en nuestro caso (6 cm diámetro de la rueda).
También podemos configurar y leer la dirección de cada motor individualmente.
Transceptor de Bluetooth
Necesitamos esta parte para comunicarse de forma inalámbrica a nuestra aplicación móvil. Esta comunicación pretende simmulate la IOT. El módulo vhdl maneja el protocolo de envío de los valores actuales de la etiqueta y también recibir información importante desde el exterior. La información exterior se procesa en tiempo real usando una máquina de estados finitos dentro de la FPGA.
Lectores RFID
En primer lugar, si no se conocen con la tecnología RFID, aprender los conceptos básicos aquí.
Funcionalidad de lector de la etiqueta: una etiqueta viene en gama de un lector (y que operan en la misma frecuencia) del tag envía nuevo su valor pre-codificados (12 bytes).
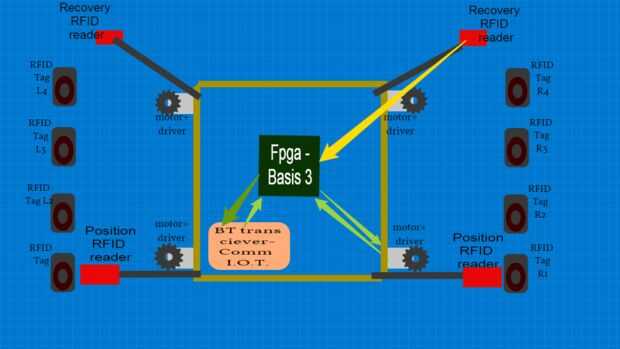
Como se ve en el esquema funcional, tenemos dos tipos de lectores:
- Lectores de recuperación - su única obligación es mantener el vehículo en el camino.
- Lectores de posición - los lectores leen la etiqueta
Lectores de recuperación:
- En un caso ideal, los lectores nunca leen una etiqueta.
- Este algoritmo mantiene el vehículo dentro de las dos líneas de etiqueta.
- Sobre todo, asegura que el vehículo no va fuera de pista.
- Si un lector entra en la gama de una etiqueta, significa que el vehículo está demasiado cerca del borde.
- El vehículo automáticamente dirige en la dirección opuesta de la etiqueta leer y evita el peligro.
Lectores de posición
En contraposición a los lectores de la recuperación, el lector de posición siempre debe leer la etiqueta que viene adelante. Se utiliza en:
- Seguimiento de la posición en tiempo real de la rover, comparado con el mapa de la etiqueta y enviarlo a la IOT.
- Se envía el código recibido en el FPGA para la transformación posterior y el control.
- En el FPGA podemos preparar y calcular que la próxima gira que necesitan hacerse.
- Este algoritmo ayuda a evitar una activación del lector recuperación y proporciona el vehículo con una conducción suave.
Etiquetas RFID
La colocación de la etiqueta RFID depende de los lectores los brazos de apoyo. Si imprime el modelo 3d que utiliza, éstas deberán colocarse aproximadamente 5 cm de distancia de la placa base y con 2 cm de distancia entre ellos.
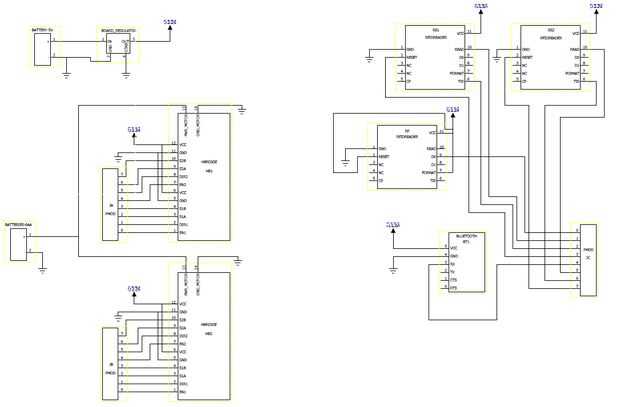
También atamos el esquema de las conexiones entre el tablero de 3 Basys, lectores RFID, controladores de Motor y módulo de Bluetooth.

")

![Sistema de autenticación Smart [Intel IoT] basado en RFID](https://foto.askix.com/thumb/170x110/2/c8/2c82152bef683471b2f395c417079829.jpg "Sistema de autenticación Smart [Intel IoT] basado en RFID")





")


 - el futuro de la automatización casera (INTEL IoT)")
