Paso 6: Construir el destino parte 4
***********************************************
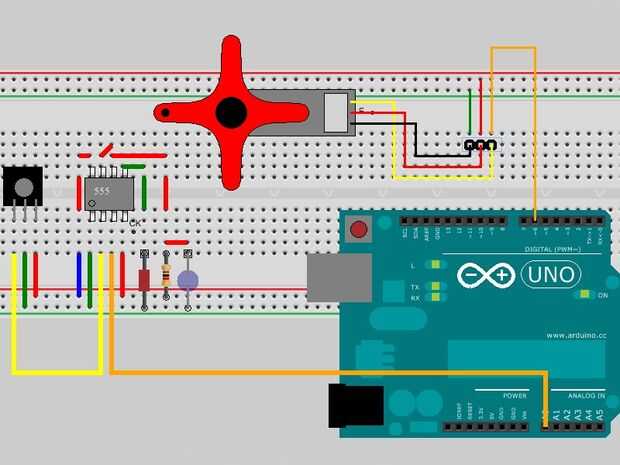
Actualización. Estoy agregando una explicación de lo que está sucediendo en cada paso. En este paso empezamos con el sensor de infrarrojos. El sensor está permitiendo 5v pasar a través del envío de una señal alta al circuito 555 temporizador. Cuando el sensor IR recibe una entrada de IR se enciende, que envía la señal al temporizador 555 baja. Es donde los sensores IR trabajo extremos.
El temporizador 555 se asume aquí. El circuito 555 temporizador pone hacia fuera una señal baja a través del pin de salida hasta que recibe una señal baja a través de la clavija de entrada desde el sensor de infrarrojos. Una baja en los gatillos de la clavija de entrada del circuito para enviar que el pin de salida alto para un periodo de tiempo determinado por el valor de la resistencia y el condensador, después la señal al pin de salida se reanuda bajo.
Esto es donde entra el Ardiuno. El propósito principal de Arduino es suministrar una señal pwm para controlar el servo. El Arduino envía una señal diciendo el servo para mover a cero y se repite el bucle en este estado hasta que recibe una señal de alta desde el temporizador 555 en la clavija de entrada designada (A0 en este caso). Cuando A0 recibe una señal alta Arduino genera una señal pwm que el servo a 90 grados los lazos del bosquejo volver al principio y continúa a repetir el bucle en el estado de 90 grados hasta A0 recibe una baja otra vez del Temporizador 555 y regresa a cero. Recuerde que el circuito 555 permanece alto para una cantidad dada de tiempo lo que nos permite mantener la señal de alto y el servo a 90 grados durante unos segundos sin poner un retraso en el bosquejo.
Puede haber una manera de eliminar el temporizador 555 por adaptar algo como un abrir y cerrar sin esbozo de retardo para el servo a 90 grados durante unos segundos. He tratado mi propio para adaptar un abrir y cerrar sin código de retraso sin embargo probablemente debido a mi falta de entendimiento que no he sido exitoso en lo. Así que por ahora se pegue con mi solución de hardware.
Hay una ventaja a usar el circuito 555 temporizador. La salida del circuito 555 puede utilizarse para tareas menos complejas por ejemplo, activar un relé, enciende algunos LED, cualquier cosa que se puede hacer con simple y las señales pueden ser controladas por el temporizador. Esto deja el Arduino libre para hacer tareas más complejas. También amplía el número de posibles objetivos. Un Arduino Nano tiene 8 terminales analógicos. Debido a mis limitados conocimientos de programación, que solo me da 8 entradas para objetivos, que a su vez sólo utiliza 8 pernos digitales a la salida a los objetivos. Así que mi Arduino se limita a 8 objetivos. Si tuviera que usar un temporizador 555 para controlar relés, luces, etc. la cantidad de destinos posibles es ilimitado.
Este es un breve bosquejo para controlar un servo en el pin digital 6 uso de la entrada en el pin analógico A0
#include < Servo.h >
int sensorpin0 = A0; pin analógico utilizado para conectar el sensor sharp
val0 int = 0; variable para almacenar los valores del sensor (inicialmente cero)
Servo myservo0; crear objeto servo para controlar un servo
int pos = 0;
void setup()
{
Serial.Begin(9600); inicia al monitor serial
myservo0.Attach(6); se fija el servo en el pin 7 al objeto servo
}
void loop()
{
val0 = analogRead(sensorpin0); Lee el valor del sensor sharp
Si (val0 > 10) {}
myservo0.Write(90); cambiar la posición del servo a 90
}
Else {}
myservo0.Write (0);}
}






")






