Paso 8: Construir todos

Aquí está mi dibujo de servo completo 8 objetivo 8
*******
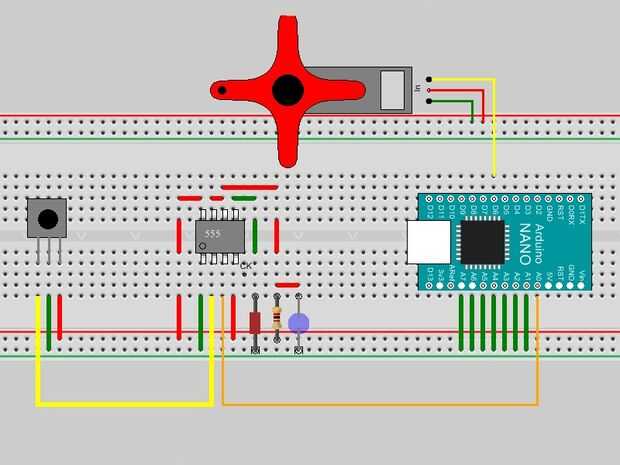
Descubrí que si se intenta usar este código completo con un único sensor de actualización / servo, tiene todos los pines analógicos conectar a tierra. El gráfico muestra también mi actual configuración protoboard con un Arduino Nano. Demuestra que sólo un sensor IR y un servo.
#include < Servo.h >
int sensorpin0 = A0; pin analógico utilizado para conectar el sensor sharp
int sensorpin1 = A1; pin analógico utilizado para conectar el sensor sharp
int sensorpin2 = A2; pin analógico utilizado para conectar el sensor sharp
int sensorpin3 = A3; pin analógico utilizado para conectar el sensor sharp
int sensorpin4 = A4; pin analógico utilizado para conectar el sensor sharp
int sensorpin5 = A5; pin analógico utilizado para conectar el sensor sharp
int sensorpin6 = A6; pin analógico utilizado para conectar el sensor sharp
int sensorpin7 = A7; pin analógico utilizado para conectar el sensor sharp
val0 int = 0; variable para almacenar los valores del sensor (inicialmente cero)
int val1 = 0; variable para almacenar los valores del sensor (inicialmente cero)
int val2 = 0; variable para almacenar los valores del sensor (inicialmente cero)
val3 int = 0; variable para almacenar los valores del sensor (inicialmente cero)
val4 int = 0; variable para almacenar los valores del sensor (inicialmente cero)
val5 int = 0; variable para almacenar los valores del sensor (inicialmente cero)
val6 int = 0; variable para almacenar los valores del sensor (inicialmente cero)
val7 int = 0; variable para almacenar los valores del sensor (inicialmente cero)
Servo myservo0; crear objeto servo para controlar un servo
Servo myservo1; crear objeto servo para controlar un servo
Servo myservo2; crear objeto servo para controlar un servo
Servo myservo3; crear objeto servo para controlar un servo
Servo myservo4; crear objeto servo para controlar un servo
Servo myservo5; crear objeto servo para controlar un servo
Servo myservo6; crear objeto servo para controlar un servo
Servo myservo7; crear objeto servo para controlar un servo
int pos = 0;
void setup()
{
Serial.Begin(9600); inicia al monitor serial
myservo0.Attach(6); se fija el servo en el pin 7 al objeto servo
myservo1.Attach(7); se fija el servo en el pin 7 al objeto servo
myservo2.Attach(8); se fija el servo en el pin 7 al objeto servo
myservo3.Attach(9); se fija el servo en el pin 7 al objeto servo
myservo4.Attach(10); se fija el servo en el pin 7 al objeto servo
myservo5.Attach(11); se fija el servo en el pin 7 al objeto servo
myservo6.Attach(12); se fija el servo en el pin 7 al objeto servo
myservo7.Attach(5); se fija el servo en el pin 7 al objeto servo
}
void loop()
{
val0 = analogRead(sensorpin0); Lee el valor del sensor sharp
val1 = analogRead(sensorpin0); Lee el valor del sensor sharp
val2 = analogRead(sensorpin0); Lee el valor del sensor sharp
val3 = analogRead(sensorpin0); Lee el valor del sensor sharp
val4 = analogRead(sensorpin0); Lee el valor del sensor sharp
val5 = analogRead(sensorpin0); Lee el valor del sensor sharp
val6 = analogRead(sensorpin0); Lee el valor del sensor sharp
val7 = analogRead(sensorpin0); Lee el valor del sensor sharp
Si (val0 > 10) {}
myservo0.Write(90); cambiar la posición del servo a 90
}
else if (val1 > 10) {}
myservo1.Write(90); cambiar la posición del servo a 90
}
else if (val2 > 10) {}
myservo2.Write(90); cambiar la posición del servo a 90
}
else if (val3 > 10) {}
myservo3.Write(90); cambiar la posición del servo a 90
}
else if (val4 > 10) {}
myservo4.Write(90); cambiar la posición del servo a 90
}
else if (val5 > 10) {}
myservo5.Write(90); cambiar la posición del servo a 90
}
else if (val6 > 10) {}
myservo6.Write(90); cambiar la posición del servo a 90
}
else if (val7 > 10) {}
myservo7.Write(90); cambiar la posición del servo a 90
}
Else {}
myservo0.Write (0);
myservo1.Write (0);
myservo2.Write (0);
myservo3.Write (0);
myservo4.Write (0);
myservo5.Write (0);
myservo6.Write (0);
myservo7.Write (0);}
}






")






