Paso 8: Administración de un motor

Que rigen el prototipo es muy simple. No fue el generador. Un carburador de gas natural no tiene ninguna estrangulación y trabaja diferentemente que un carburador de gasolina. En definitiva la válvula de mariposa debe estar abierta para permitir que el gas natural comienzan a dibujar cuando el motor arranque. Esto es demasiado combustible inicialmente y el motor sobre la velocidad. Posición del acelerador de arranque y de ralentí debe determinar manualmente y en el sketch de Arduino. Además el motor máximo RPM seguro debe determinar de la literatura del fabricante y nunca superado. El Arduino debe comprobar empezar RPM en un intervalo corto. Una vez RPM empieza a construir, en este caso > 1500, ajuste ralentí acelerador posición. Otra vez, si no está familiarizado con los motores no hacerlo como exceso de velocidad puede ser destructiva.
La imagen es una de las pruebas. El gobernador es en Auto (con control PI), RPM 3678, 993 fue la analógica lectura de temperatura motor pero estaba mal conectada. Siguiente línea es la posición del acelerador al 32, 0 cambio último cómputo de la RPM, y el bosquejo ha estado funcionando durante 13 minutos.
Sin carga (generador de no alimentar la casa) prueba determina Kp = 0.012, Ki = 0.0016 y medio segundo entre cálculo de RPM o un conteo de 30 revoluciones. El paso a paso debían ajustarse al paso cuarto para precisión del acelerador desde paso completo era demasiado grueso. Si la RPM fue evaluada en un intervalo más corto que el motor todavía se acelera a de anteriores cambios de aceleración que caza. Los motores son difíciles de controlar con ajustes de válvula reguladora baja. Mirando una válvula de mariposa se puede ver cómo pequeños cambios en el brazo del acelerador provoca cambios más grandes en área de flujo de la válvula de mariposa (sección transversal) en la toma de. En última instancia sin carga RPM gobernó muy bien.
El bosquejo principal es publicado verrugas y todo. La sección grandes son RPM sensing (activar cuenta), GovernorPID y el control de paso a paso (Motorstep). Motorstep fue una modificación de los bocetos de Arduino.
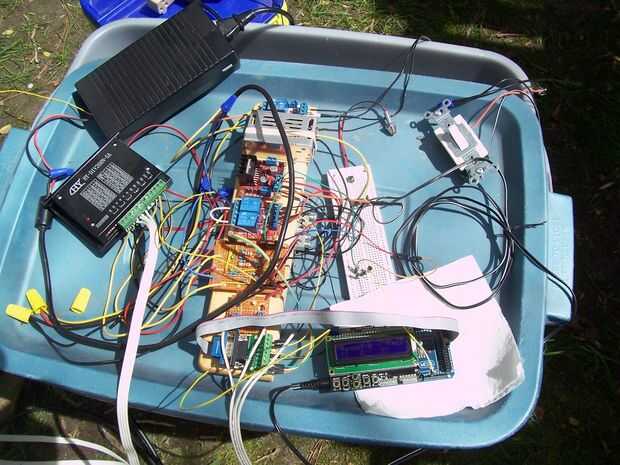
La última foto en este paso es todo el proyecto. Los relés y el cableado era sobre todo 12 vdc de conmutación y control para proteger la electrónica de los picos de tensión causados por el ciclo de inicio y carga de la batería y el motor. Los que no se discuten ya que son muy específicos para este motor Briggs y Stratton. Cada proyecto tendría que trabajar su propia problemas de suministro de energía.













