Paso 2: Realizar las conexiones
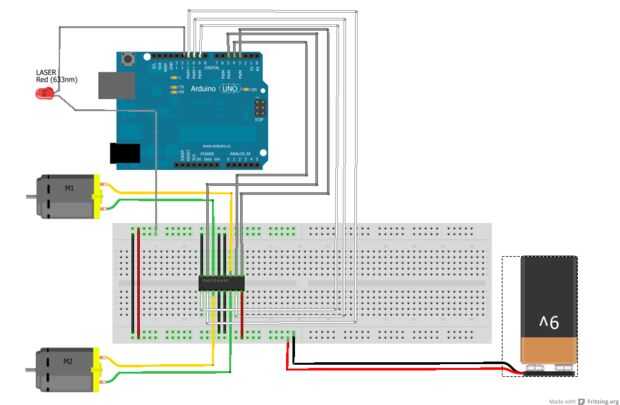
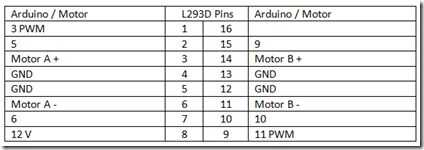

La imagen adjunta muestra cómo se ha conectado. El digram muestra cómo se realizó el cableado. Se realizó control de velocidad con PWM a través de Arduino.
Un motor funciona a una velocidad constante de valor PWM de 32 y el otro velocidad puede aumentarse o disminuirse mediante dos pulsadores.
Cuando ambos motores a la misma velocidad aparece una elipse constante.













