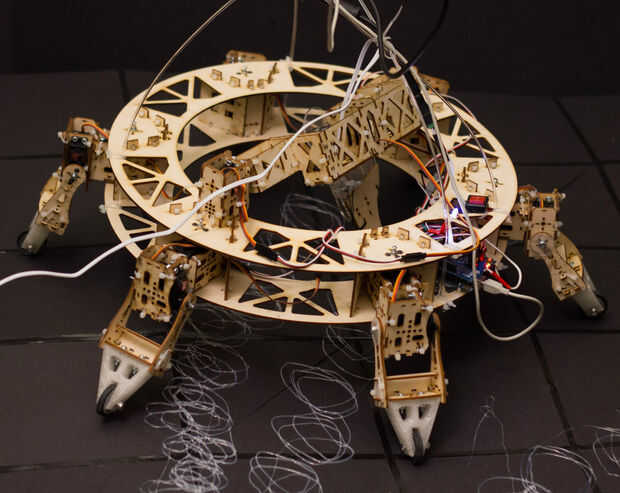


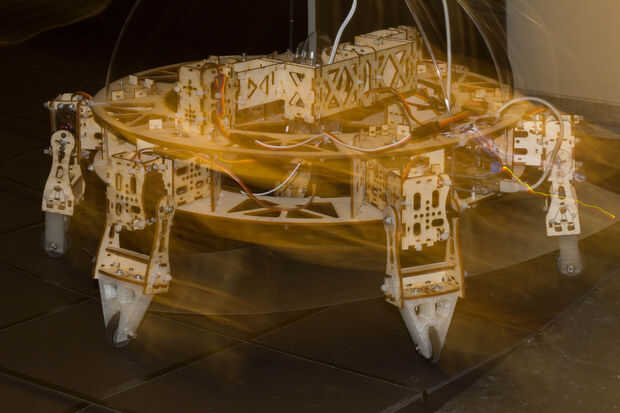
Geoweaver es un robot de estudiantes diseñado (miembros del equipo Jia Wu, Mary Sek y Jeff Maeshiro) creado en el estudio de opciones avanzadas Máquinas de arquitectura creativa en el California College of Arts (CCA) en San Francisco, California, impartido por Jason Kelly Johnson de Laboratorio de las ciudades del futuro y Michael Shiloh. El diseño se basa en un hexápodo de 12 servos con un extrusor de pistola de pegamento adjuntado, es la culminación de cerca de 60 días de investigación y creación de prototipos y, que podemos Google, es la primera impresora 3D a pie de todo el mundo. Aunque el robot oficial de nombre es Geoweaver, que también va por muchos alias: asesino de Servo, devorador de escudos, fundidor de cables y destructor de los reguladores, entre muchos otros. Es un equipo muy difícil y delicado y no es un proyecto a abordar para los débiles de corazón.
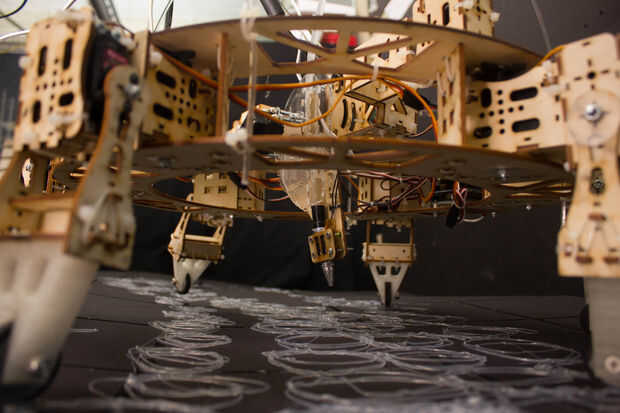
Pero si se toma a sí mismo para aceptar sus retos, sus recompensas son grandes: es una impresora 3D de seis patas, camina. El mecanismo del centro utiliza dos servos para controlar la cabeza extrusora de péndulo-como, lo que le permite cubrir un básico XY plano (aunque curvado a la superficie de una esfera, ver video arriba) y un servo para el engranaje de la protuberancia que las fuerzas de los palillos del pegamento a través de la "cabeza de impresión". Todo esto puede controlarse mediante el software Rhino 5, con el plug-in Grasshopper y Firefly (desarrollado por el profesor Jason).
En primer lugar, debemos mencionar un Instructable que nos ayudó en el comienzo de nuestros prototipos, la extrusora de pistola de pegamento caliente para su máquina de CNC o proyecto de impresora 3D. Nos dio un gran punto de partida para nuestra cabeza de impresión y agradecimos a la pierna. En segundo lugar, utilizamos este tutorial para averiguar cómo hacer espirales en saltamontes, aunque las espirales que hicimos salieron bastante intensas.
En tercer lugar, aquí hay un video del desarrollo día 62 procesos con diferentes pruebas materiales y versiones de prueba del robot.
Por último, este proyecto fue desviado y endiabladamente difícil y no habría sido posible sin la guía de nuestro profesor Jason Kelly Johnson (incluso escribiendo una encargo Arduino a Firefly una firmado para poder usar el escudo de servo, vea la Fig. 8). Y por supuesto nuestros otros Michael Shiloh del profesor que dio consejos, especialmente con los dedos del pie con ruedas, un poco bastante ingenioso de innovación mecánica, si se nos permite decirlo. Gracias también a Andrew Maxwell-parroquia de Laboratorio híbrido de CCA (y artista en residencia ElectricSlim de Instructables), su ayuda con nuestros proyectos fue emparejado solamente por su entusiasmo para todos ellos. Estamos agradecidos a todos tres por su inestimable ayuda.
De todos modos, vamos a conseguir Instructablesing.
Elementos necesarios (herramientas):
- Sierra de banda vertical
- Destornillador de cabeza Phillips/plana en varios tamaños
- Taladro eléctrico y brocas para taladro
- Cortadores de alambre
- Alicates de punta
- Instrumentos, regla de medida o muy preferentemente pinzas
- Cortador del laser
- Impresora 3D
Materiales:
- 15 servos de alto torque (con el servo en forma "+" cuernos y servo centro tornillos que deben venir con el kit
Pernos y tuercas de seguridad (aproximadamente 48 de ellos) o cualquier pernos de ajuste a través de los agujeros de la brida de servo (los orificios laterales). Por lo menos 3/8 '' largo (suficiente para 1/4 '' plástico o Al y una contratuerca caber allí)
Elementos requeridos (electrónica):
- Arduino Uno
- Protector de servo
- Computadora
- Jefes masculinos
- Los cables de puente (o alambre de núcleo único conveniente para breadboards)
- Cables de extensión de servos
Elementos requeridos (programas):
- Rhino 5
- Plugin de saltamontes (para Rhino 5)
- Plugin de Firefly (para Grasshoppper)
- Arduino

. ¿")
")










