Paso 2: Construir el segmento cadera de la pierna
Encontramos que la mecánica junto con la relación de las piezas es imprescindible para el hexápodo caminar suavemente (sin mencionar el código), pero primero debe estabilizar la mecánica del hexápodo.
Esto incluye averiguar el protector para cada uno de los motores y sus conexiones entre sí. Desea el hexápodo que estable y ligero.
También, tener en cuenta usar ranurada o conexiones de cola de Milano con ranuras adyacentes para quick zip atan conexiones y uso las mismas dimensiones en otras partes así que usted puede mezclar y combinar si es necesario. Hace la construcción rápida y segura. También, toma en cuenta la posición del servo. Quiere crear un ambiente donde hay menos torque para el motor, que podría significar los servos alrededor de los bancos, y asegúrese de que las juntas están centradas en el cuerpo del hexápodo. Cualquier pedazo torpe compensación puede afectar el código y cómo camina el hexápodo.
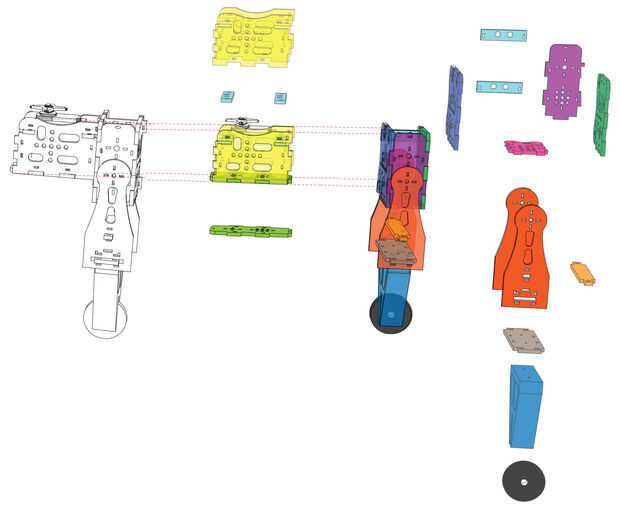
Si usted está usando nuestro diseño y ha impreso las partes, utilizar:
Angeles (2)
E.i (2)
L.b
y sujetar con abrazaderas de plástico. Asegúrese de que usted asegure una tuerca por debajo el servo para unir al cuerpo.
* Colocar los cuernos en servos y etiqueta cada cadera y rodilla. Preferiblemente, las caderas serán todos una cinta de color con anotaciones, y la rodilla sería el otro color con anotaciones.
* NO se restrinja el servo girando en el centro a cualquier pieza hasta servo es cero o calibrado. Esto podría tira del servo, causando que ya no funcionan.

. ¿")
")










