Paso 3: Finidhing apagado y codificación



Ahora es el momento para ser creativo.
Aquí he utilizado a toboganes simples para obtener el mármol de la garra a la brocheta de kebab.
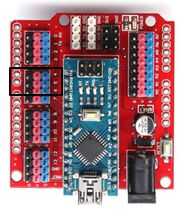
Una vez hayas creado el mármol ejecutar, conectar el arduino Nano para:
Servo del hombro para pin digital 4
Servo de codo para pin digital 5
Servo de mano para pin digital 6.
¡Buena suerte!
Abajo está el código:
#include
Servo handservo;
Servo elbowservo;
Servo baseservo;
void setup() {}
handservo.Attach(6);
handservo.Write(130);
Delay(1000);
elbowservo.Attach(5);
elbowservo.Write(125);
Delay(1000);
baseservo.Attach(4);
baseservo.Write(75);
Delay(1000);
}
void loop() {}
elbowDown();
baseDown();
handClose();
baseUp();
elbowUp();
handOpen();
}
void handOpen() {}
para (h int = 97; h < = 130; h += 1) {}
handservo.Write(h);
Delay(15);
}
Delay(1000);
}
void handClose() {}
para (int a = 130; a > = 97; un-=1) {}
handservo.Write(a);
Delay(15);
}
Delay(1000);
}
void elbowDown() {}
para (int d = 125; d > = 5; d-=1) {}
elbowservo.Write(d);
Delay(20);
}
Delay(1000);
}
void elbowUp() {}
para (int e = 5; e < = 125; e += 1) {}
elbowservo.Write(e);
Delay(20);
}
Delay(1000);
}
void baseUp() {}
para (int b = 147; b > = 75; b-=1) {}
baseservo.Write(b);
Delay(20);
}
Delay(1000);
}
void baseDown() {}
para (int c = 75; c < = 147; c += 1) {}
baseservo.Write(c);
Delay(20);
}
Delay(1000);
}





![BRAZO robótico de la Xbox 360 [ARDUINO]: Axioma brazo](https://foto.askix.com/thumb/170x110/a/73/a73fe094730384e00961d770d1d63f61.jpg "BRAZO robótico de la Xbox 360 [ARDUINO]: Axioma brazo")
 Básicos Arduino Robot buscador de luz!")




