
¿Lo que es capaz de?
1. se puede controlar mediante gestos.
2. puede enviar valores etc., nivel de batería, temperatura, distancia objeto del guante (LCD).
3. puede ejecutar en ángulo de 45 grados.
4. par de Tx Rx en rover y guante (para la transferencia de datos bidireccional).
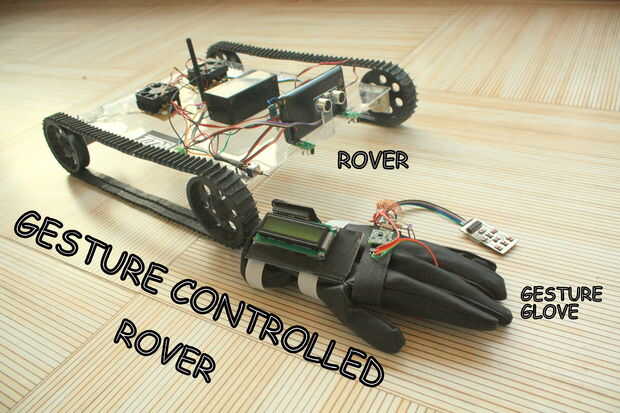
Por qué usar joysticks para controlar robot cuando se puede controlar por los gestos de su mano! Este Rover robótico trabaja en los módulos de banda RF de 433MHz (consultar).
El control remoto se modifica en un guante equipado con
un acelerómetro (ADXL335)
pantalla de LCD 16 x 2
teclado de 8 botones
y un transceptor
El rover y el guante se basa en el ATmega328 P que se utiliza en el Arduino Uno
PIEZAS ***
Unidad de ROVER ( he llamado TITAN: D)
1.ATmega328P
2. el controlador robótico compatible con arduino por encargo
3. DIY cable FTDI (USB a serie)
4. telémetro ultrasónico HC-SR04
5. 2 x sensores ópticos (para convertirlo en un seguidor de línea)
6. 2 x controladores Amp Motor 30 personalizados: hacer su propio controlador de MOTOR
7. 2 x 150 RPM y el kgf-cm 5 motores de la C.C. del esfuerzo de torsión
8. 12V capacidad de Ah de la batería de SLA (selladas de plomo ácido) 1.2
9. 4 x ruedas de pista y la pista correa
10. acrílico hoja chasis (usé hoja gruesa 4mm)
Gesto de guante:
1. un guante
2. ATmega 328p basado en tablero
3. acelerómetro ADXL335
4. 16 x 2 pantalla de LCD
5. un teclado de 8 botones
6. 433Mhz transmisor-receptor
7. algunas cabeceras y cables de cinta


 - controlado por iPhone, basado en arduino")










