Paso 4: Instalar sensores y cuerpo FINAL
CÁMARA inalámbrica (para la vista en primera persona FPV)
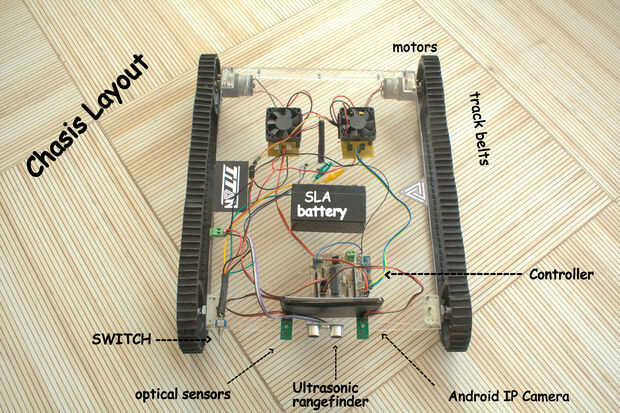
yo he montado en un teléfono con android que funciona como una cámara IP (conseguir esta app: IP Webcam)
El androide crea un hotspot wifi, para conectar mi portátil directamente al teléfono (sin cualquier enrutador externo). Ahora puedes vivir FPV de su ROVER!
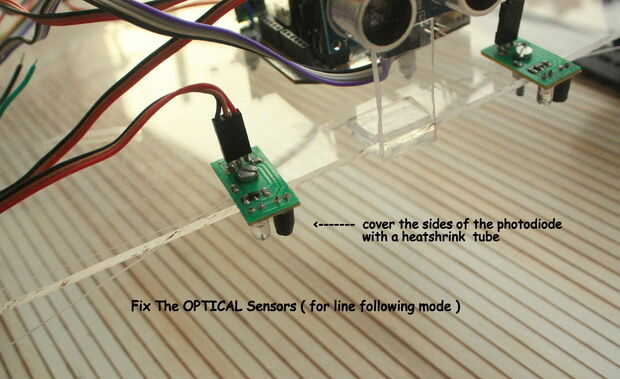
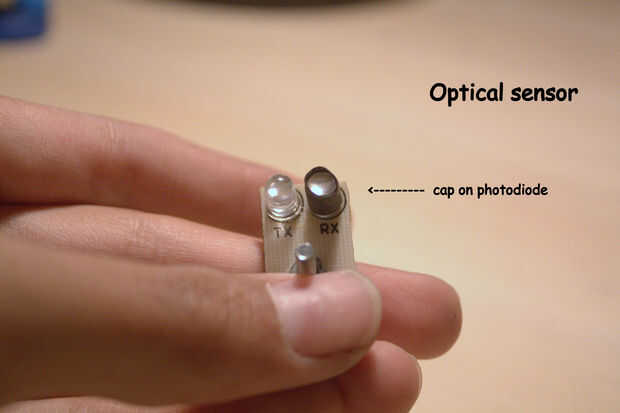
SENSORES ÓPTICOS:
He unido dos sensores ópticos que utilizan un LED rojo ultrabrillante un fotodiodo como Tx como Rx, el fotodiodo está cubierto con un tubo abierto de tubo del encogimiento del calor 6 mm. Esto se hace para evitar lectura falsa, los sensores se fijan hacia abajo para convertirlo en una línea que sigue el robot.
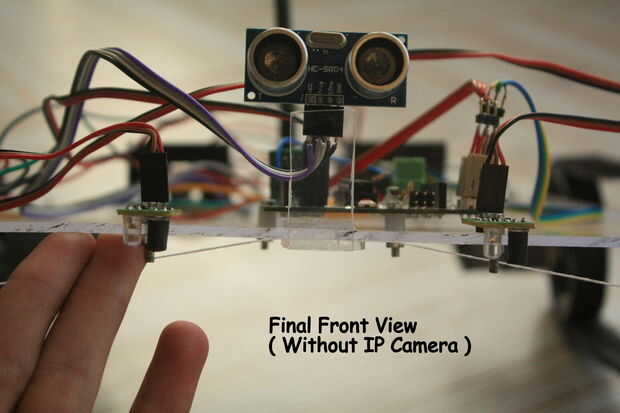
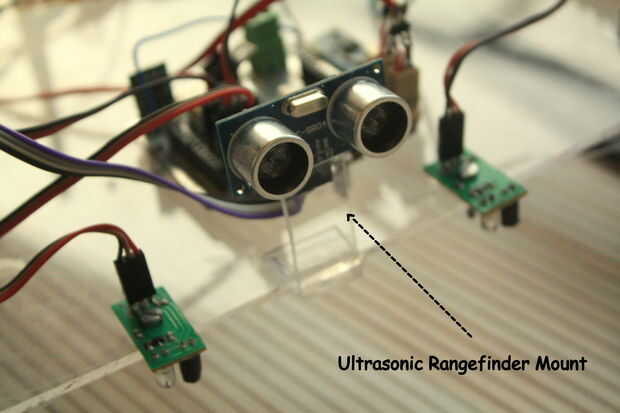
SENSORES ULTRASÓNICOS:
La HC-SR04 se monta usando un pequeño pedazo de acrílico y algunos pegamento. El Monte tiene un encabezado de 4 pines hembra donde se fija el HC-SR04.
SENSOR DE TEMPERATURA:
Dos sensores de temperatura análogos LM35 se insertan firmemente en los disipadores de calor de los conductores del motor. Si está usando bajo girar motores, por ejemplo el 380 (Mabuchi RS-380SH) o cualquier otro hobby offroad motores entonces es muy recomendable para los ventiladores de refrigeración. Conseguir realmente calientes, caliente lo suficiente como para destruir los MOSFETs.
Más alcance:
Hay gran variedad de sensores que podría implementar, como algunos LDRs, sensores SHARP, etc.)


 - controlado por iPhone, basado en arduino")










