Paso 17: Transmisor: el gesto del receptor y fuente de alimentación de conexión
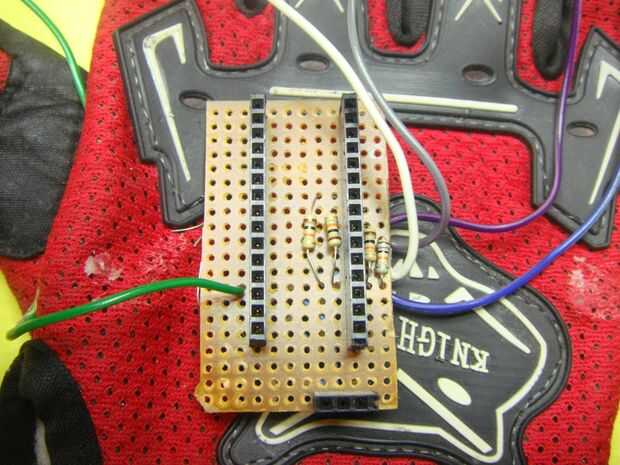



Ahora se conecta nuestro receptor de gesto a nuestro microcontrolador. ¡ Soldarlos directamente a la placa. No con cuidado ya que puede romper el alambre. Siga los siguientes pasos para conectar su receptor del gesto a la placa Arduino:
- Pulgar---5V de Arduino
- Dedo índice---pin digital 4
- Dedo medio---pin digital 5
- Dedo anular---pin digital 6
- dedo meñique o bebé---pin digital 7
- Corta perno digital 4,5,6 y 7 con una resistencia de 10K a GND de Arduino.
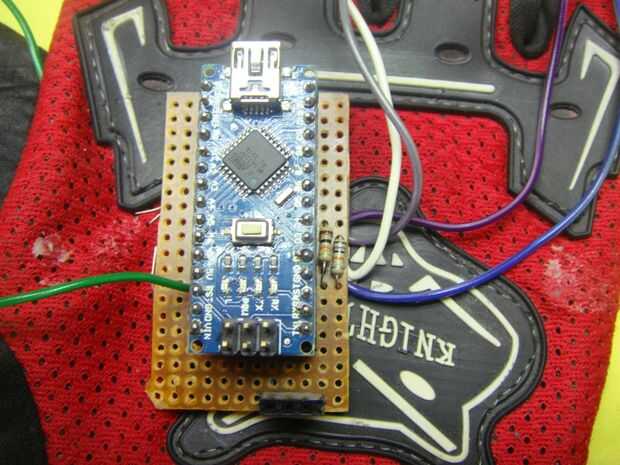
Hay muchas funciones en nuestro robot pero tenemos sólo cuatro dedos en la mano. No podemos controlar el movimiento de la robusteza y luces y la bocina al mismo tiempo. Así que decidí hacer este proyecto trabajar en dos modos. En el primer modo puede controlar el movimiento del robot y en el segundo modo puede controlar varias funciones como bocina y luces. El modo de la robusteza es seleccionado por un botón. Si usted quiere encender la luz tienes que cambiar su guante al segundo modo de encender las luces y otra vez cambiar su modo y controlar el movimiento. En mis fotos puedes no ver empuje como me olvidé de añadir un botón pero en fotos después, se puede ver una diapositiva interruptor del interruptor. Usé el interruptor y vio que un pulsador será mejor. Tomé las fotos antes por lo que no puedo cambiarlo. Conectar patillas de pulsador a 5V de Arduino y segundo para pin digital 11. Corto digital pin 11 a tierra con una resistencia de 10K.
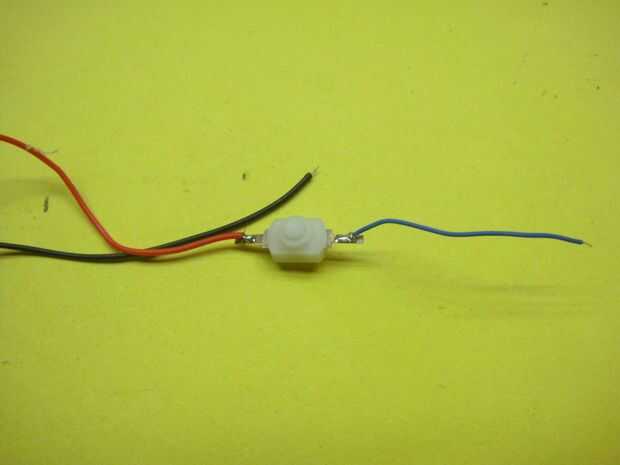
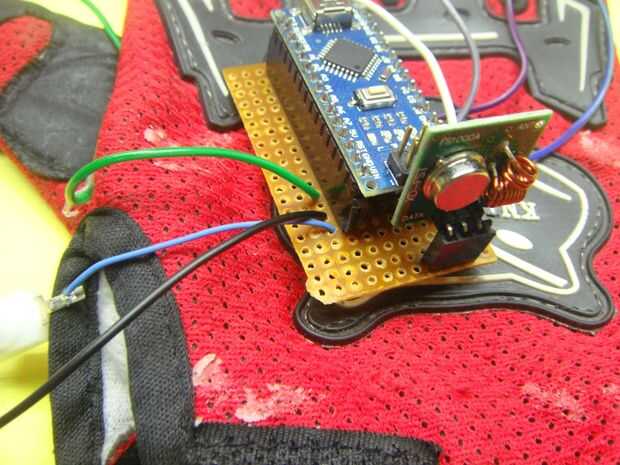
Tomar un interruptor y conectar el positivo de su clip de batería de 9V para uno de los pines del interruptor y otro pin para un pequeño trozo de alambre. Conectar gnd de Arduino a la negativa de 9V batería clip y vin pasador de Arduino al otro lado del pequeño cable conectado con el interruptor. Ahora tu Arduino está conectado a la batería y está listo para trabajar.
 con Arduino y Android(bluetooth)")

")









")
