Paso 2: Descripción del circuito:








BOM:
Cantidad | Descripción | RefDes |
1 | 12V DC POWER_SOURCES | |
4 | CAP_ELECTROLIT, 220uF | C6, C9, C1, C4 |
2 | CAP_ELECTROLIT, 470uF | C3, C2 |
2 | CONDENSADOR de 100nF, | C5, C7 |
1 | CAP_ELECTROLIT, 100uF | C8 |
2 | DIODES_1N4001 | D1, D2 |
2 | IC DE VCO | XR2209, XR2209_2 |
1 | POTENCIÓMETRO, 100kΩ | R2 |
2 | Barbero, 10kΩ | R6, R15 |
1 | Barbero, 2kΩ | R7 |
1
RESISTENCIA, 100kΩ
R9
6
RESISTENCIA, 10kΩ
R5, R4, R3, R1, R16, R18
6
RESISTENCIA, 1kΩ
R13, R14, R11, R10, R17, R12
1
RESISTENCIA, 200Ω
R8
1
Servo SG90
Servo
1
VOLTAGE_REGULATOR, LM317LM
U2
1
VOLTAGE_REGULATOR, LM7805CT
U3
1
OPAMP, LT1014CN
U1
1
MOS_3TEN, 2N7000
Q1
1
Relé de 5V
X1
Otros: una caja de pequeño proyecto, cables de conexión, PCB, algunos separadores y tornillos, un trozo de tablero de plástico, un pequeño trozo de ángulo de aluminio ¾.
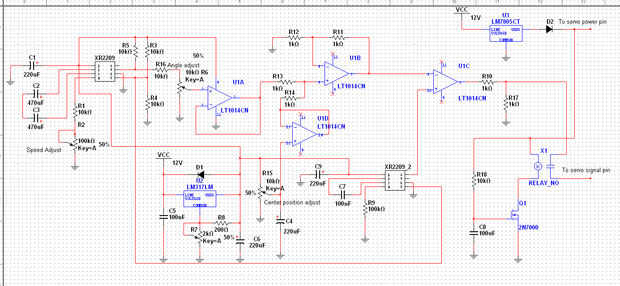
Fuente de alimentación:
Yo uso D1, U2, C5, C6, R7 y R8 juntos para obtener 9V DC de 12V DC para alimentar el circuito. Para servo usar LM7805 para obtener 5V DC. C8, R18, Q1 y relé X1 juntos es un circuito de retardo de tiempo. El tiempo de demorado es aproximadamente 3-4 segundos. El propósito del circuito de retardo es dejar que el circuito PWM para asentarse primero antes de conectar el servo.
Circuito PWM servo posición:
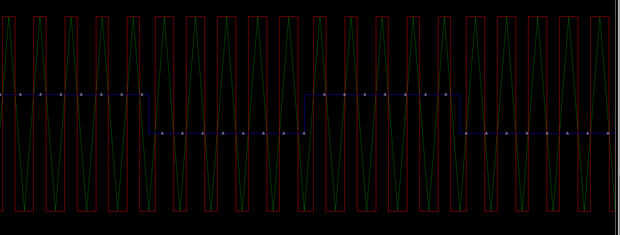
XR2209_2, el C7 y el R9 es un generador de onda de triángulo. F = 1/C7R9 = 100Hz. Uso LT1014 del opamp como comparador. Comparando el voltaje en el Pin 9 y 10 de Pin, Pin8 se genera una onda cuadrada. La frecuencia es igual a la onda del triángulo, y el ciclo de trabajo se establece por la tensión Pin9.
Servo de holding circuito PWM de tiempo:
XR2209, C1, C2, C3, R1, R2, R3, R4 y R5 juntos es un generador de onda cuadrada. La frecuencia se establece por C2, C3, R1 y R2. U1B, R11, R12, R13 y R14 juntos es un amplificador sumador. Suma la señal de onda cuadrada de R6 y el voltaje de referencia de R15.
Ajuste del circuito:
Para ajustar la posición neutra del servo, ajustar la tensión en el Pin3 U1A a cero mediante el ajuste de R6 y ajuste R15. Cuando el voltaje de U1A Pin3 es cero, la salida en Pin7 de U1B es una tensión constante y la salida de U1C es una onda cuadrada de 100Hz con un ciclo de trabajo fijo por R15. Ajuste lentamente la R6 para ajustar la posición del servo. El tiempo de retención es la posición por R2.
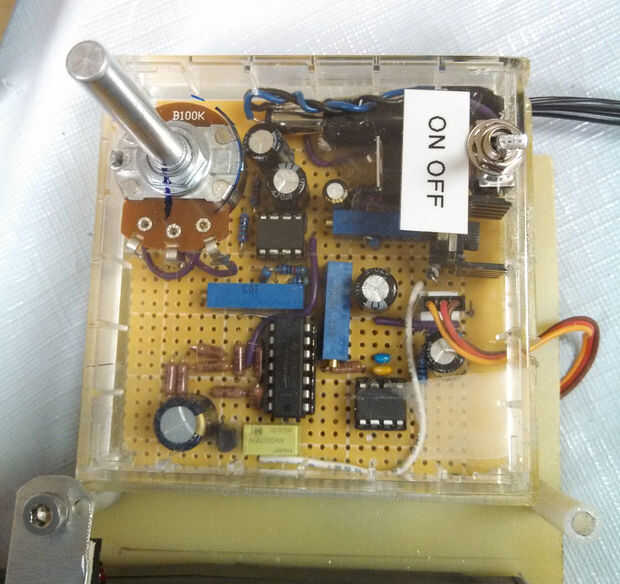
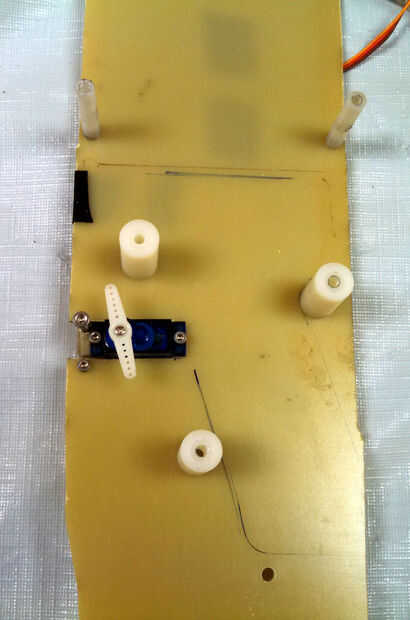
Configuración mecánica:
Utilizar un contador de células de BioRad cuenta diapositiva embalaje caja como el recinto del circuito, y funciona perfectamente. Para la placa de montaje utilizo un trozo de tablero FR4. Utilizo tres separadores para colocar el dispensador de la pipeta y dos separadores para colocar la caja, y luego corté dos trozos pequeños de hoja de aluminio para montar el dispensador de la pipeta y el recinto. Añado un pequeño trozo de ángulo de aluminio al tablero FR4 para que el kit entero se puede fijar en un soporte.












