Paso 1: La teoría
Encontré un artículo que tuvo una muy buena explicación, y las figuras se toman de eso.
http://www.Maritime.org/fleetsub/elect/chap17.htm
En primer lugar, un girocompás trabaja mediante el uso de un disco giratorio de alta inercia rotacional, por tener gran masa hacia el borde de un disco que gira a altas RPM.
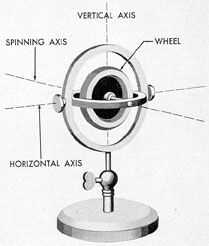
La primera figura muestra un giróscopo libre, con tres ejes de libertad, que dos están en pivotes, mientras que el tercero es el giro del spin eje. Un giróscopo de eje libre mantendrá un eje de giro direccional constante ya que no hay ninguna fuerza actuando sobre él.
Precesión es cómo un girocompás resiste el cambio de dirección. Cuando se aplica un esfuerzo de torsión a un giróscopo, se aplica un perpendicular de precesión esfuerzo de torsión. Una de las instancias más prácticas esto es countersteering en una motocicleta, como el jinete tuerce agresivamente las barras (pulsando en el interior bar), el de rueda delantera genera una torsión para que apoye la moto en la esquina, permitiendo que el motociclista cambiar de dirección rápidamente.
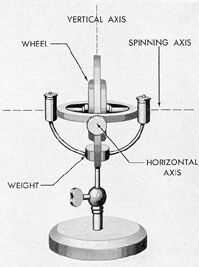
La segunda figura muestra el tipo de giróscopo que he hecho; un girocompás pendular. Esto es sólo un giróscopo libre, pero con un peso en la parte inferior. Este peso aplica un esfuerzo de torsión para asegurar que el eje de giro es siempre horizontal. Porque este esfuerzo de torsión se aplica a un giróscopo, a su vez aplica una torsión precesión, que rota el giro alrededor de su eje vertical.
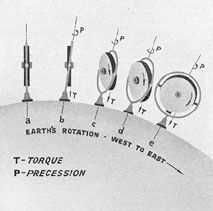
La tercera figura muestra cómo se utiliza para crear una brújula giroscópica. Como la tierra gira, el encabezado horizontal cambia a menos que el giróscopo esté apuntando a lo largo de un mismo eje de giro como la tierra. El girocompás intenta seguir la dirección horizontal debido a la par del peso pendular. Una vez que se alinea el eje de giro de giro con eje de giro de la tierra no hay par aplicado en el giro, y su título se estabiliza.


")





")




