04/04/2012: la versión de pcb con motor de velocidad variable, GOduino II, está en mi blog http://techbitar.blogspot.com/2012/04/goduino-ii-motor-driver-arduino-uno.html y aquí
29/03/2012: correcciones a la sección de cálculos de carga del motor.
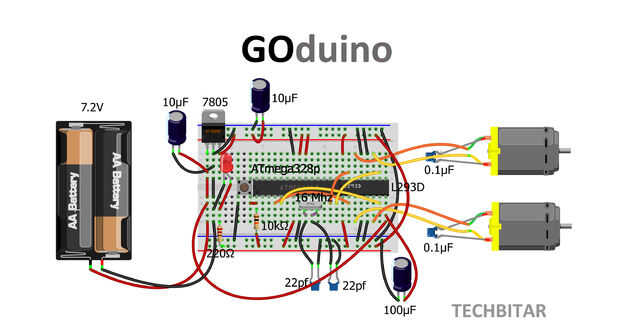
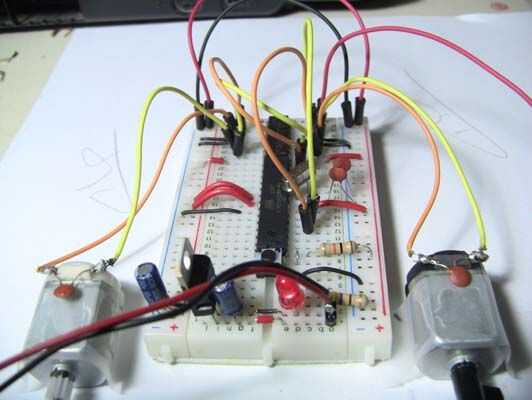
14/03/2012: he añadido un condensador electrolítico de 100 uF entre la fuente de energía del motor (8 pines en el L293D) y GND. El diagrama de Fritzing muestra la adición de este condensador pero las fotos aún no. He también he arreglado algunos errores tipográficos.
INTRODUCCIÓN
He diseñado unos robots usando la Arduino Uno y el escudo del Motor de Adafruit. Ambos son grandes para prototipos. Pero desarmar mi robots cada vez que necesitaba para construir otro robot. No es rentable para comprar más microcontroladores Arduino y motor escudos para cada nuevo proyecto de robot.
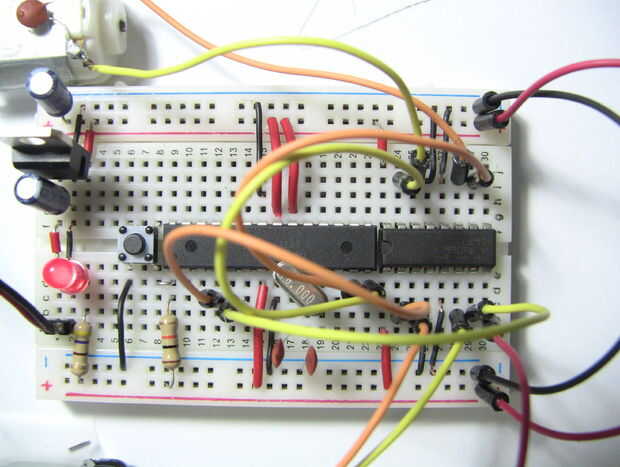
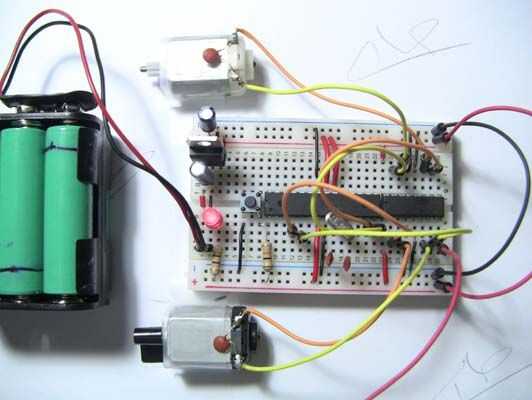
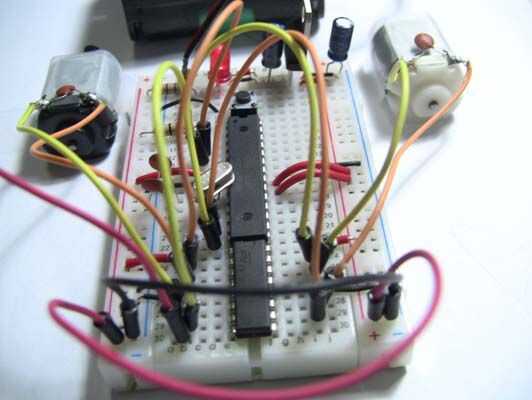
Así que he decidido al controlador de robot de GOduino de diseño low cost "run-time" que combina la funcionalidad de Arduino Uno y, hasta cierto punto, el escudo del motor. Para esta guía, he usado un protoboard pero podría también han soldado la GOduino en un PCB.
He comprado unos ICs ATmega328p (DIP) con el cargador de arranque Arduino previamente quemado, pero se puede comprar el ATmega328 en blanco luego quemarse el cargador de arranque de Arduino. La gente de Arduino ha sugerido algunas maneras de hacerlo: http://arduino.cc/en/Hacking/Bootloader
De ahora en adelante, pronto como he terminado de construcción y pruebas de un nuevo robot, se sustituyo el Arduino Uno y combo de escudo del motor con el GOduino. Por supuesto, el sketch de Arduino debe modificarse para tener en cuenta que ya no estoy usando la biblioteca de programación que viene con el escudo del motor.
Compruebe el código de prueba simple por Guilherme Martins (abajo) y usted verá que no es tan difícil portar tu dibujo de escudo del motor en el entorno de GOduino.
Para construir el GOduino, combinado estos dos proyectos:
) Construyendo un Arduino en un protoboard por David A. Mellis
http://Arduino.CC/en/Main/Standalone
II) controlar sus motores L293D y Arduino por Guilherme Martins
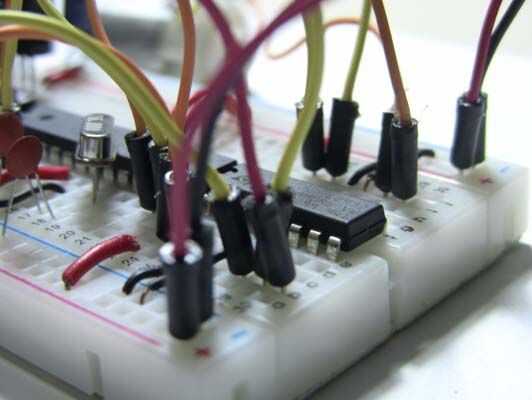
No voy a repetir a las guías anteriores como los autores hicieron un buen trabajo con documentación e ilustraciones. Proporcionará instrucciones visuales para ayudar a entender cómo se combinan los dos proyectos en la GOduino.
En cuanto a la programación el ATmega328, usé el Arduino IDE 1.0 para programar el microcontrolador mientras todavía insertado en el zócalo DIP de Arduino Uno. El IDE había terminado de subir mi dibujo de robot, yo simplemente extraído el ATmega328 Arduino Uno y luego insertado en la placa.
Así que mi próxima tarea es para mi robot de línea siguiente II Faz3a con el GOduino mientras que construir otro robot con el Arduino Uno y escudo del motor.
CÁLCULOS DE CARGA DEL MOTOR
La carga máxima total (carga de parada/máxima) para cada motor no debe superar 600 mA para un máximo de 1.2A para dos motores. Usted puede encontrar la corriente puesto de máximo de pico del motor de la hoja de datos o por la prueba con un multímetro. Esto es lo que soporta el L293D. Los motores en mi robot de línea siguientes están bien dentro de estas gamas (360mA en puesto de pico de máximo). Pero hay un camino de casi duplicar la fuerza del L293D.
Es posible a cuestas dos virutas del L293D para casi el doble de su corriente. Un L293D solo puede suministrar 1.2A para ambos motores. Trata de 600mA por motor. Piggyback pueden manejar un L293D segunda y el combo 1.2A por motor y 2.4A para ambos motores combinados.
El SN754410 es pin compatible con el L293D y puede proporcionar 1A para cada motor para un total de 2A de 2 motores. También es posible a cuestas el SN754410 para 2A por motor y 4A para 2 motores.
El L293D tiene diodos de protección contragolpe cuando los motores invertir dirección, por lo tanto el D sufijo pero no el SN754410. Es un trade off.
LISTA DE PIEZAS
COMPONENTES DE HARDWARE
-Quemado ATmega328p (DIP) con el cargador de arranque de Arduino para comodidad
-L293D puente H (DIP)
-Regulador de voltaje 7805
-Cristal de reloj 16 MHz
-LED
-Resistencia 220 Ohm
-10K resistencia de Ohm
-Condensadores: electrolíticos 100 uF 2 x 10 uF electrolítico, 2 x 0.1 uF cerámico, 2 x 22 pF cerámico
-Arduino Uno w/DIP ATmega328p (para programación solamente)
-Breadboards y cables
-2 x motores de corriente continua (cada < 600mA corriente y < 1.2A pico/puesto)
SOFTWARE
-Arduino IDE 1.0
Como con mis otras guías, comentarios y correcciones son bienvenidas.
")











![Sistema Ambilight extrema [ws2801 + arduino uno]](https://foto.askix.com/thumb/170x110/f/71/f71ff2bf24032a1fd7cc04fafc0926df.jpg "Sistema Ambilight extrema [ws2801 + arduino uno]")
