Paso 4: Construir un robot de protoboard con GOduino III
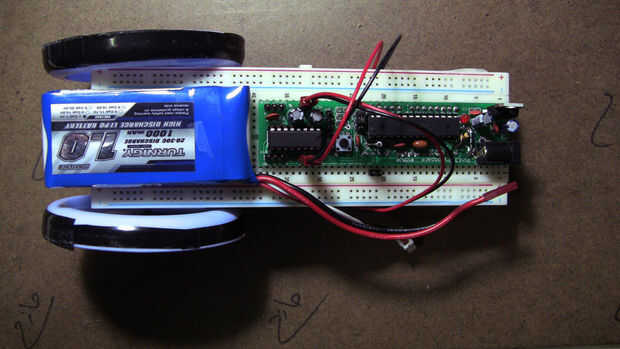

Se trata de un prototipo de robot de protoboard que construí en menos de media hora. Quería ver lo rápido puedo montar un robot de GOduino III en una plataforma de tablero con un presupuesto reducido. El robot está programado (vía el programador USB FTDI) para mover hacia adelante y hacia atrás.
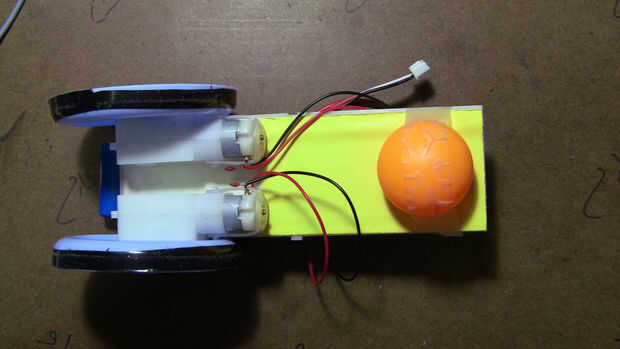
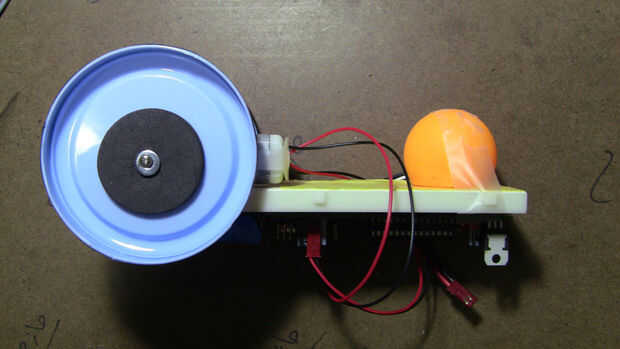
Las ruedas están cubiertas de contenedores de plástico. Utiliza almohadillas adhesivas para darles más grueso para los tornillos no se peguen hacia fuera demasiado.
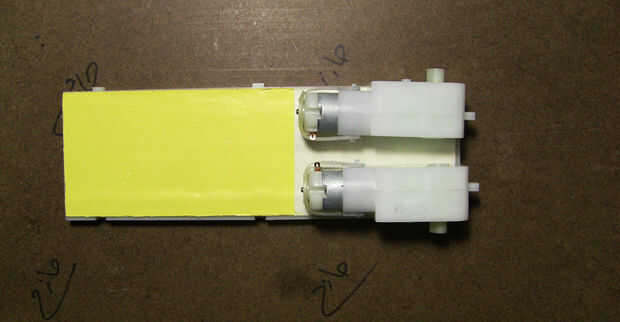
Usé dos GM9 cual motores de engranaje plástico se puede comprar para $6 desde lugares como Solarbotic, Robotshop, chip. Estos motores DC cepillados son clasificados en una corriente de pico/puesto de 700mA a 6V que está bien para el GOduino III.
La parte inferior de la placa tiene una tira adhesiva que se le atribuye. Sólo había pelado parte de él y colocarse los dos motores GM9.
Usé un 7.4V batería de Lipo (2 células) y también la configuración con 7.5V (6 X AA NiMh) batería y funciono. Hay caída de 1V en el L293D para que el voltaje a 6.5V cerca que es un poco sobre las clasificaciones de 6V de motores. Las baterías se mantuvieron en su lugar sobre la placa con un pedazo de cinta.
Para rueda, usé una pelotita de ping pong atada con cinta a la protoboard.
Puedo añadir sensores y otras partes por enchufados directamente en el protoboard y se conectan a la III GOduino con cables de puente.
Para prototipos de robot rápido y barato y para mis talleres, el factor de forma de protoboard-ambiente del III GOduino puede hacer la vida más fácil para los novatos pero tiene todo el poder necesario para mis proyectos personales robot.
Este es el código utilizado en este video:
#include < Goduino.h >
Goduino myrobot;
void setup() {}
Serial.Begin(9600);
Serial.println ("Set velocidad de ambos motores a 100 (máxima 1023)");
myrobot.motorSpeed(1000,1000);
}
void loop() {}
Serial.println ("fase de prueba I - girar dos motores juntos en la misma dirección");
Delay(3000);
Serial.println ("Spin ambos motores en una sola dirección (3 seg)");
myrobot.motorForward(1);
myrobot.motorForward(2);
Delay(3000);
Serial.println ("parada de ambos motores para 1 seg");
myrobot.motorStop(1);
myrobot.motorStop(2);
Delay(1000);
Serial.println ("Spin ambos motores en dirección opuesta (3 seg)");
myrobot.motorBack(1);
myrobot.motorBack(2);
Delay(3000);
Serial.println ("parada de ambos motores para 1 seg");
myrobot.motorStop(1);
myrobot.motorStop(2);
Delay(1000);
}
")






 Chasis de plataforma-un Robot robótica Arduino DIY de piezas de repuesto")

")


")
