Paso 1: EL CONCEPTO
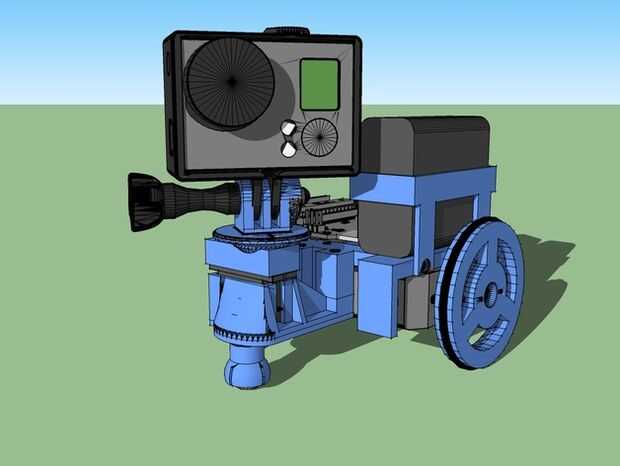

La idea era hacer un robot por control remoto, con cámara integrada, para poder ser manejado a distancia y pecado tener visión directa de él. De los posibles sistemas de control remoto se nos antojó como más harmonización el WIFI, ya pensábamos nos permitiría una mayor autonomía, cobertura y posibilidad de transmisión de vídeo en tiempo real, al menos en un área controlada, y con posibilidad de llegar a controlarlo en remoto desde internet (esta parte está aun por lograr). Dado teníamos una Gopro, la cual se conecta en streaming con su propia aplicación con el teléfono móvil, pensamos parte del trabajo ya lo teníamos solucionado, y todo lo el de resolver quedaba era control del movimiento del robot. Un importante handicap se nos presentó en las primeras pruebas, fue el descubir el streaming de la cámara tiene un retardo de unos segundos. Este pequeño inconveniente, no obstante para nosotros tenía algo de positivo, o simpático ya hacía el control del robot se pareciese un manejar un robot en marte!!!!!! Seguramente será algo con solución, pero en nuestro caso, es casi mas un punto a favor una pega. Dicho esto, por lo demás se trata de un rover con dos servos de rotación continua, montados en un chasis sobre el se sitúa la electrónica y una montura para la cámara, con un micro servo permite el giro de 180 º.









")



