

por Josh Berman, Terry Bugai, Kent salmón y Mayur Chiba
boceto del informe técnico adjuntado:
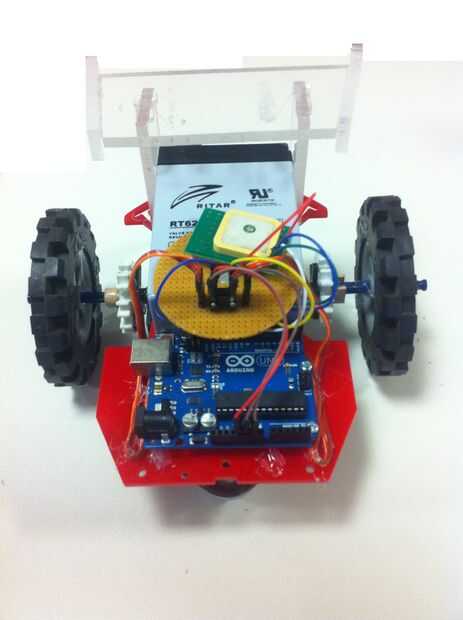
Resumen
Este documento contiene el desarrollo e implementación de un rover GPS (Global Positioning System) guiada. El rover es competir en una carrera en una pista previamente definida que consiste en vértices de coordenadas GPS. El diseño se compone de una base de metacrilato, batería, motores servos, módulo GPS de Ublox y un microcontrolador Arduino ATMega328. El microcontrolador recibe la entrada del módulo GPS en formato de cadena a través de comunicación serial. Esta información luego es enviada a través de nuestro camino de encontrar el algoritmo y se calcula la dirección. El rover recorre el curso con menores contratiempos. Recomendaciones de mejora incluyen algoritmos alternativos y sensores adicionales.
 Stage1Model2")

")
 utilizando un Arduino")

")

")





