Paso 4: Configuración de controlador de vuelo
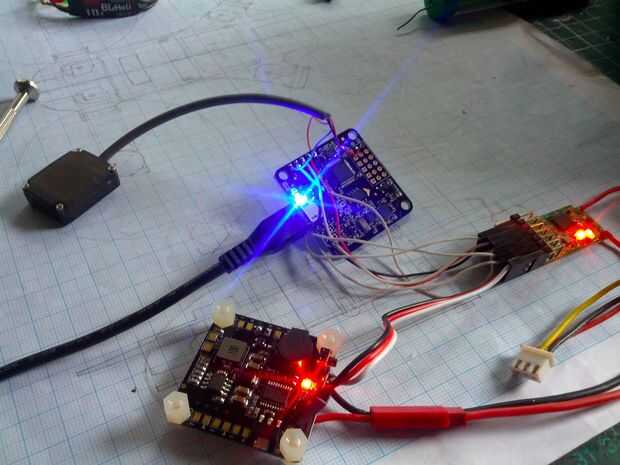
Para ahorrar peso y para que todo cabe dentro de la cabina, opté por la soldadura de los cables de entrada RC y el GPS los cables directamente a la FC Naze32 (como en la imagen).
TIP: hacer toda esta configuración en un tablero de plástico, o sobre el plan de papel, es decir. no cerca de cualquier cosa conductor! Es muy fácil al cortocircuitar la delicada electrónica mientras haces esta configuración!
Hay muchas guías en línea sobre cómo hacer el instalación y el cableado para el Naze32. Aquí está uno para Rev5.
He encontrado que el firmware de fábrica de la FC era muy antigua o no compatible con CleanFlight, así tuve que flashearlo primero con la última versión.
Tengo setup mi OrangeRX 6 canales receptor (en la foto con el estuche de plástico naranja eliminado para ahorrar peso/talla). Se trata de un receptor no PPM, así que hay un alambre separado por canal más una tierra (negro) y un cable de 5V (rojo) va a la Naze32. Para dichos receptores y GPS, la NE tiene una extraña Convención donde debe ir el rx/tx del GPS con pernos de 3/4 de London, con los canales de línea regular (AIL, ELE, THR, RUD) en cada lado, en los pines 1,2 y 5,6. AUX1 y Aux2 son entonces en clavijas 7,8.
Receptores PPM solo el cable de señal ir al pin 1 (y los cables de tierra/5V a pernos generalmente), y GPS rx/tx pines 3,4.
Hice la configuración de la Naze32 (en el software del configurador de CleanFlight) con la configuración en la imagen. El PDB Matek tiene un conector de 3 pines para conectar a un canal AUX en el receptor (esto es para encender manualmente el beeper o LEDs), pero también es muy útil como una forma de conseguir la energía de 5V regulada para el receptor y el London FC. (en la imagen este es el cable de tres hilos pasando de PDB al receptor, en su canal AUX2)
Con toda esta configuración, asegúrese de que CleanFlight es informar correctamente a los canales del receptor y la señal GPS válido. Es más difícil para realizar cambios en todas estas conexiones más adelante cuando se instala, así que mejor para hacerlo bien en esta etapa.
La soldadura de los pines de salida del motor
El FC Naze32 viene con dos juegos de pernos que puede soldar a la Junta. Hay rectas y 90 grados (inclinada) pin establece. Tomar la recta set (el conjunto de perno recto de 6 x 3) y cortar los dos últimos 3 pasadores de un extremo para que tengas 4 x 3 pines. La soldadura de estos pines en la parte inferior de la London, ocupando las salidas 1 a 4 (de 6). Resultados 1 a 4 serán para conectar los cables de señal de salida de cuatro.
Los LEDs de la NE deben mostrar en la parte superior, con los pernos ya soldados en la parte inferior (para salidas 1-4)





")





")

