Paso 5: Electronics(1): micro PIC y el VIII de PAK
He utilizado un microcontrolador PIC, porque mi intención original era poner las baterías, regulador, etc. todo en el robot para que sea autónomo, pero tuvo que apresurarse a completar ya que estaba construyendo para un evento (idiotarod de la ciudad de Nueva York), usé sólo cordones de extensión largos para alimentación al robot de una fuente de alimentación externa.
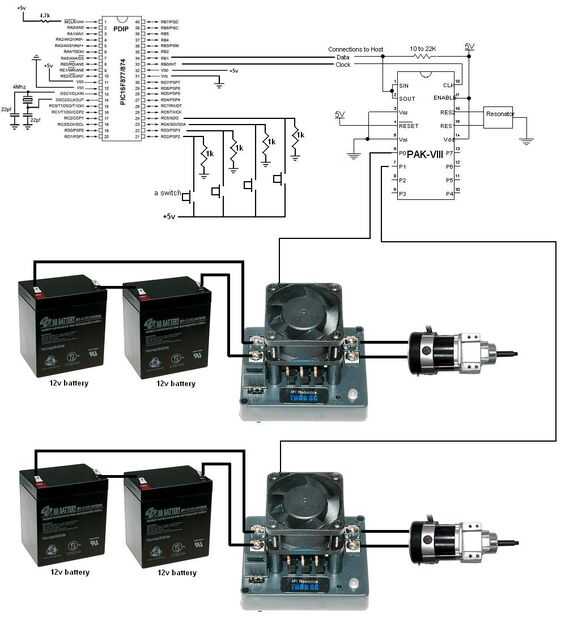
Para permitir que el PIC controlar los motores mientras que también hace otras cosas (como escuchar a los comandos, o lo que sea), usted querrá utilizar un coprocessor de modulación (PWM) de ancho de pulso como el VIII de PAK. Este chip tiene un valor registrado del PIC y se encarga de enviar el pulso correcto ancho comandos al regulador Victor 885. Ingeniárselas para interfaz del PIC por medio del software era un poco de dolor, usted puede descargar el código que usé (LBigWalk.bas).
El esquema de cómo conectar todo junto está por debajo.
PARA VER EL CIRCUITO IMAGEN COMPLETO SIGA EL SIGUIENTE ENLACE:




")








