Paso 5: electrónica
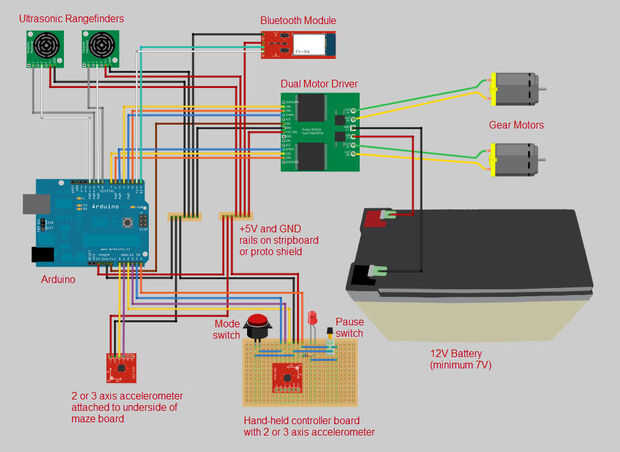



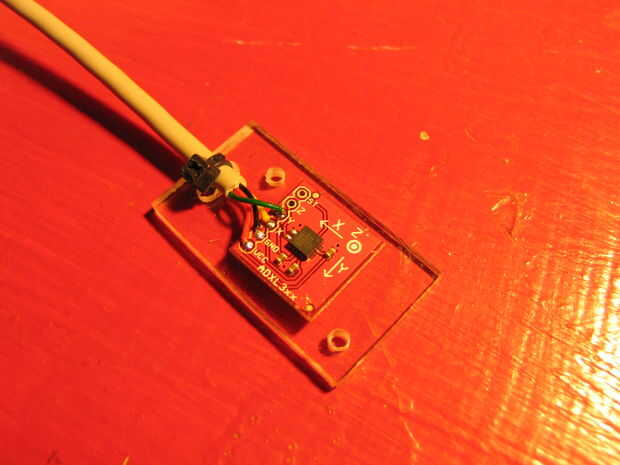
Ninguno de los componentes deben ser exactamente lo que he usado. Cualquier acelerómetros de 2 ejes (o 3 ejes) deben estar bien. Mayoría de las placas compatible Arduino será suficiente. Deberían funcionar cualquier Telémetros que pueden dar lecturas significativas entre cerca de 3 pies y 10 pies.
Utilicé una 12V 10Ah batería de SLA que duró un día completo de cerca de recinto ferial continuo uso y uso ocasional durante un par de meses desde entonces y todavía va fuerte en la primera carga. Por lo tanto, usted podría conseguir lejos con el uso de una batería de capacidad mucho más pequeña. El voltaje de la batería se dentro de la Vin Arduino recomienda gama de 7V a 12V.
Usé 6 cable de teléfono (RJ11) y tomas de corriente para conectar el regulador de mano para el Arduino. Planeo hacer esto para las conexiones del Telémetros. Utilicé cable 16AWG para la batería y las conexiones del motor.
Usé un escudo de prototipos para realizar todas las conexiones en el Arduino, por lo que las conexiones son sólidas y el Arduino se puede quitar fácilmente si es necesario.
Los motorreductores que utilicé son overkill para este propósito, pero funciona muy bien desde el alto esfuerzo de torsión y velocidad la Junta muy sensible. Pensé que si he usado un eje de 8mm (5/16") como el tambor de tirar de la secuencia, quiero que centrifugado hasta 1000 RPM para obtener una buena Junta tilt velocidad. Tengo un motor que rota a 500 RPM en 12V, así que añadido engranaje de 1:2 para obtener la velocidad de tambor de cuerdas. Para obtener esa velocidad, pensé que el motor necesitaría aproximadamente 1 par kg-cm. (16 oz-in). Los motores de engranaje podrían poner hasta 5 kg-cm (84 oz-in). Yo he conectado mi hoja de cálculo calculadora de velocidad/par motor/engranaje rápidamente que podría ser útil si desea utilizar diversos motores (motor_calcs.xls).













