Paso 5: Cableado y programa

Para este paso lo haga con cuidado
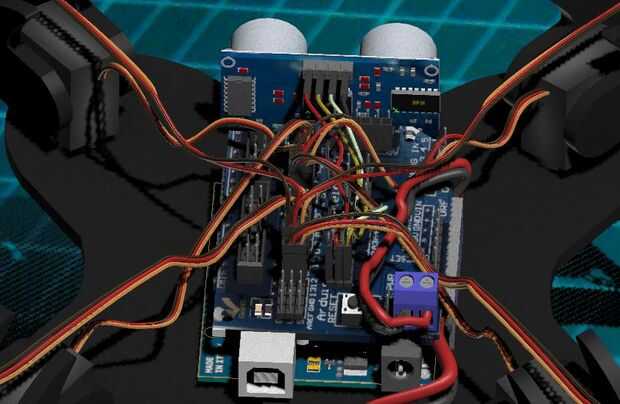
Marco y mecanismo es ya ahora para cableado forfirs usted debe conectar la clavija de servo en el escudo de sersor de clavija de entrada arduino, primero mira Pic1 con cuidado, recuerde la posición del servo y esta una lista donde el servo conectado
1. servo 1 al Pin 2
2. servo 2 al Pin 3
3. servo 3 al Pin 4
4. servo 4 a Pin 5
5. servo 5 al Pin 12
6. servo 6 al Pin 11
7. servo 7 al perno de 10
8. servo 8 al Pin 9
9. Trigueros ultrasónico sensor al Pin A0
10 sensor ultrasónico de Echo Pin a1
Asegúrese de conectar la clavija en la posición derecha rojo para vcc, negro o marrón a la tierra amarilla o blanco para los datos.
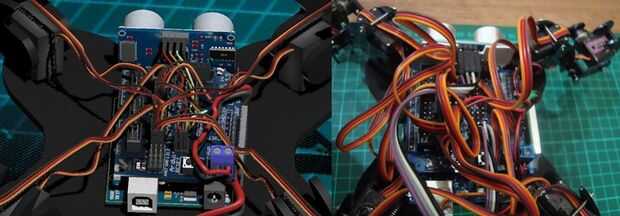
A continuación debes attact el Ubec protector sistema, conecte el pin de salida Ubec al pin de alimentación en protector de servo, rojo para Vcc negro para la tierra.
Último paso conectar el arduino al ordenador con USB camle, descargar el archivo .ino aready attact en thes paso. Abra el arduino.ide Abra el programa de archivo y subir a la Junta.
de hecho este programa para mi robot de 3dof cuadrúpedos, pero no es un problema para robot 2dof podría utilizar un 1 y 3, mientras que 2 se omiten 2dof robot.
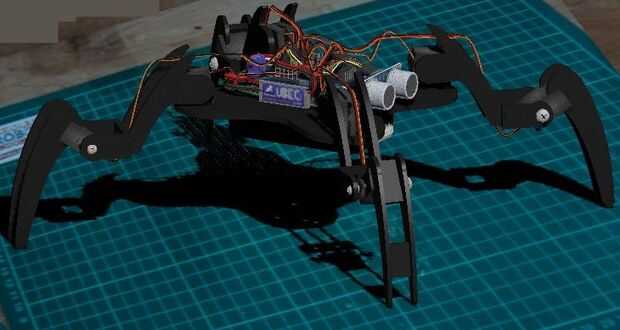
Su Robot ahora está ya a la acción, wallk y evita desde el obstáculo. Conecte el ubec de entrada a la batería de lipo, poner la batería debajo del cuerpo del robot.












