Paso 2: Resumen
Mecánicamente, Grovin' Grover se basa en una marioneta de dedo de Grover a cuatro servos hobby barato. Los servos están conectados a cada uno de sus miembros lo que permite movimiento independiente. Construí un simple "etapa" para la celebración de Grover y los servos en el lugar. Usé Velcro para atar el Grover y los servos al escenario para que las partes pudieran mover fácilmente y ajustadas para conseguir Grover en la posición adecuada. Cinta de pintor y clips de papel se utilizan para sujetar los hilos a los cuernos servo: los clips de papel se puede doblar para conseguir el movimiento correcto y cinta de pintor se quita fácilmente si hilos necesitan ser reemplazado.
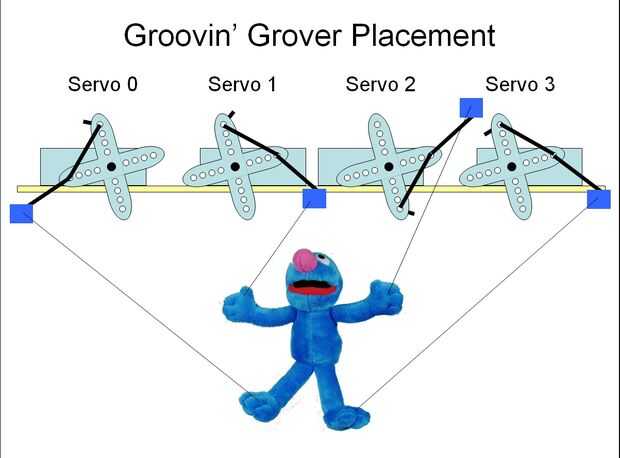
La primera figura muestra cómo Grover Groovin ' se une a los servos, cuando está en su posición inicial. Hilo de nylon transparente se utiliza para unir a sus miembros a los servos. Cuando se gira desde la posición inicial, los servos tirón hacia arriba para levantar sus pies o las manos y pueden girarse a la posición original para bajar sus pies o las manos. La programación es muy simple: en el Maestro lenguaje de programación el comando "8000 1 servo" causaría servo 1 Gire a la posición máxima y levantar su mano izquierda. El comando "4000 1 servo" posición del servo vuelta 1 a la original disminuyendo su mano. Si pones los comandos en un bucle con un pequeño tiempo de espera después de cada comando servo, Grover Groovin ' parece estar agitando en usted. El código que utiliza Grover Groovin ' poner a bailar a los videos en la primera página de este instructables se explica en el último paso. La documentación de Popolu para el microcontrolador está bien escrita y explica cómo utilizar el software y en detalle cómo programar el microcontrolador.
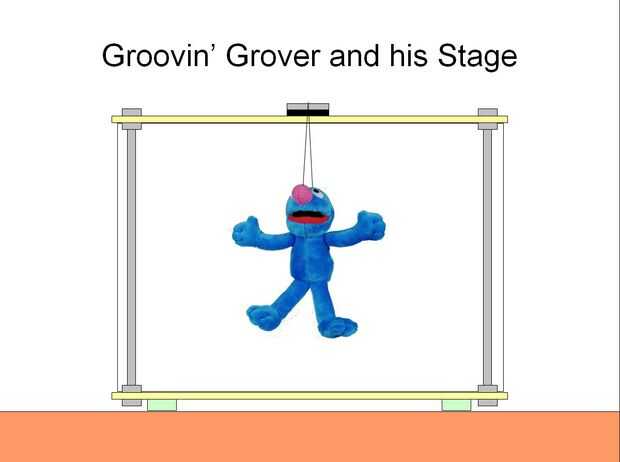
El segundo diagrama muestra Grover Groovin ' y su etapa. Su escenario está hecho de dos plataformas soportadas por varillas roscadas y tuercas hexagonales. Grover es suspendido 4" desde la plataforma superior: un trozo de hilo de nylon transparente es a través de la parte superior de la cabeza y atado a una lavadora. La lavadora se sostiene en la plataforma superior con Velcro. Patas de goma se fijan a la parte inferior del escenario para impedir que las arandelas que la superficie de donde se coloca la etapa y asegurar que la etapa no rock y hacia atrás cuando se mueven los servos. Un pedazo de tela blanca cuelga de la parte trasera del escenario como telón de fondo. El telón de fondo se encuentra en la parte inferior de la plataforma superior con Velcro. El telón de fondo esconde energía y cables USB y permite que el hilo de nylon transparente para confundirse con el fondo que permite Grover Groovin ' parecen flotar.
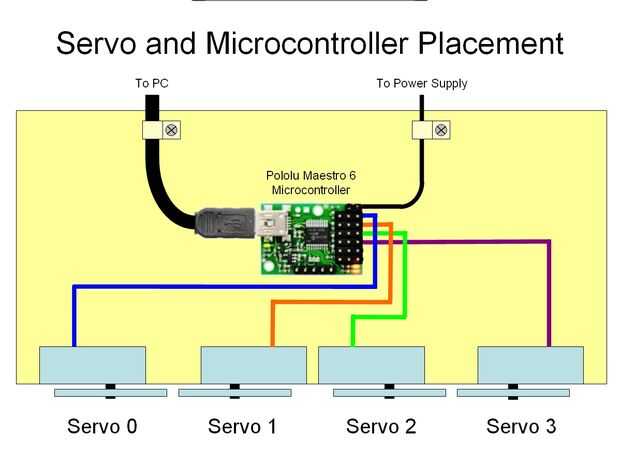
El tercer diagrama muestra la parte superior de la plataforma superior donde se encuentran Grover Groovin 'electrónica y servos. El desarrollo de programas basados en PC y software de depuración se comunica con el microcontrolador por medio del cable USB. Microcontrolador es corriente por el cable USB. Los servos son impulsados por una verruga de la pared de 5 voltios. El USB y cables de alimentación se mantienen en su lugar con abrazaderas de alambre plástico: las abrazaderas de alambre impiden que el microcontrolador se tiró accidentalmente de la parte superior de la plataforma. El microcontrolador está fijado a la plataforma con un pedazo pequeño de Velcro.
Cada servo se une al microcontrolador utiliza conectores estándar que vienen con los servos. Servo 0 controla el pie izquierdo; servo 1 controla la mano izquierda; servo 2 controla la mano derecha; servo 3 controla el pie derecho. Los servos necesitan estar conectados al microcontrolador, tal como se muestra en el diagrama para Grover Groovin ' a moverse adecuadamente. Más información sobre los diferentes conectores en el microcontrolador puede encontrarse en la Guía del usuario del controlador Servo Pololu Maestro.
Nota: A lo largo de este instructable cuando miembros de Grover se describen como izquierda o derecha es su izquierda o derecha como se quede frente a usted.
El proceso de programación Grover Groovin ' es simple. Puede iniciar el software de centro de control Maestro y escriba el programa en la ventana "Script". Haga clic en "Apply Settings" para descargar el código al microcontrolador y luego "Run Script". El centro de control incluye funciones para depuración y mover manualmente los servos así como forma alternativa de desarrollar secuencias de comandos sin utilizar el lenguaje de programación. He encontrado el software para ser muy fácil de usar y la documentación escrita bien.













