Paso 9: Paso 9: soldadura y verifique el acelerómetro
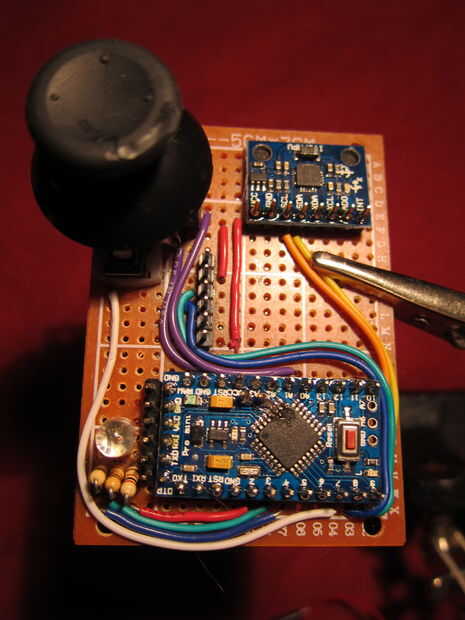
Acelerómetro de la soldadura que los pasadores están más cercanos de la parte inferior del tablero y el eje x es hacia la parte superior de la Junta.
En el IDE de Arduino, abrir el programa "MPU6050_raw" en el menú de ejemplo MPU6050. Cambiar el Serial.begin(baudrate) en el bosquejo a 9600. Cargar el programa y abrir la ventana de Serial.
Continuamente se imprimirán los datos de acelerómetro y giroscopio. Si consigues todos los ceros, compruebe las conexiones.
Una vez que están los datos del sensor adecuado, cargar el ejemplo de "AccelerometerTilt" en el menú de esfero.
La velocidad se calcula por la inclinación de x-y-z, donde la velocidad es cero cuando el plano x-y es paralelo al piso. El título se calcula usando la y inclinación/giro sobre el eje x, por lo que el esfero se dirige hacia adelante cuando los dedos del guante apuntando hacia abajo, a un lado cuando el guante está hacia los lados y cuando los dedos están de nuevo hacia el usuario. De esfero zero es adelante (será cero cuando los dedos están hacia abajo) y corre hacia la derecha desde allí (título = 90 cuando los guantes se inclina a la derecha, 180 cuando se inclina hacia atrás, y así sucesivamente).
También puede activar el bloque de retroalimentación LED mostrar los colores como los cambios de dirección (rojo = adelante, azul = atrás, amarillo = derecha, verde = izquierda)



")









