Paso 9: Servo Motor


Un servomotor es un dispositivo eléctrico que puede empujar o rotar un objeto con gran precisión. Si quieres rotar y objeto en algunos ángulos específicos o en distancia, entonces utiliza el motor servo. Sólo se compone de motor simple que funcionan a través de mecanismo de servo. Si se utiliza el motor de C.C. funciona entonces se llama motor servo de la C.C., y si es motor eléctrico de CA entonces se llama motor servo de la CA. Podemos conseguir un motor de servo muy alto esfuerzo de torsión en un pequeño y peso ligero paquetes. Doe a estas características se utilizan en muchas aplicaciones como coche del juguete, helicópteros RC y aviones, robótica, etc. de la máquina. La posición de un motor cinemático se decide por impulsos eléctricos y sus circuitos se colocaron al lado del motor.
Sistema de servo tiene ahora grandes aplicaciones industriales. Aplicaciones motor servo son también comúnmente-vistos en coches de juguete de control remoto para controlar la dirección del movimiento y se utiliza muy comúnmente como el motor que mueve la bandeja de un reproductor de CD o DVD. Al lado de éstos hay otros cientos de aplicaciones de servo motor que vemos en nuestra vida diaria. La razón principal de usar un servo es que proporciona precisión angular, es decir, sólo girará como mucho quieren y luego parar y esperar señal próxima a tomar nuevas medidas. Esto es a diferencia de un motor eléctrico normal que comienza a girar como y cuando se aplica energía a él y la rotación continúa hasta que apague. No podemos controlar el progreso de rotación del motor eléctrico; pero sólo puede controlar la velocidad de rotación y puede convertirlo ON y OFF.
Servo mecanismo
Consta de tres partes:
- Dispositivo controlado
- Sensor de salida
- Sistema de retroalimentación
Es un sistema de lazo cerrado donde utiliza sistema de retroalimentación positiva para controlar el movimiento y la posición final del eje. Aquí el dispositivo es controlado por una señal de retroalimentación que se genera al comparar la señal de salida y la señal de entrada de referencia.
Aquí la señal de referencia es en comparación con la señal de referencia y la tercera señal se produce por el sistema de retroalimentación. Y esta tercera señal actúa como señal de entrada al dispositivo de control. Esta señal está presente como señal de retroalimentación se genera o hay diferencia entre la señal de entrada de referencia y señal de referencia. Así que la tarea principal de servomecanismo es mantener la salida de un sistema en el valor deseado en presencia de ruidos.
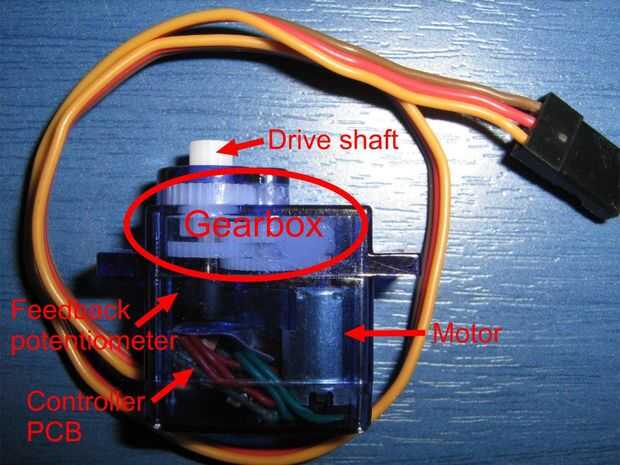
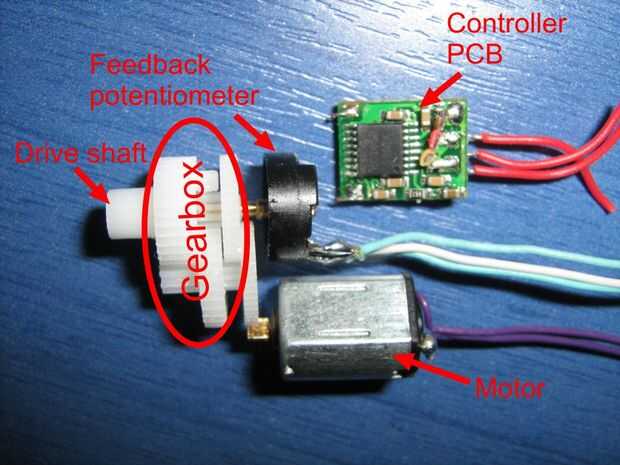
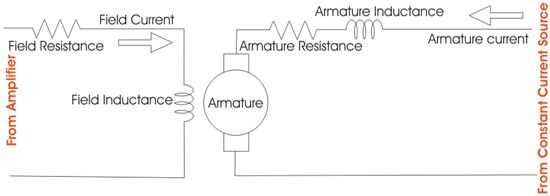
Principio de funcionamiento de los Servo motores
Un servo consta de un Motor DC o AC, un potenciómetro, ensamble del engranaje y un circuito de control. En primer lugar utilizamos ensamble del engranaje para reducir RPM y para aumentar el torque del motor. Decir en la posición inicial del eje del motor servo, la posición de la perilla del potenciómetro es tal que no hay ninguna señal eléctrica generada en el puerto de salida del potenciómetro. Ahora se da una señal eléctrica a otra terminal de entrada del amplificador del detector de error. Diferencia ahora entre estas dos señales, una viene del potenciómetro y otro viene de otra fuente, se procesará en mecanismo de retroalimentación y salida se proporcionará en términos de señal de error. Esta señal de error actúa como la entrada para el motor y el motor comienza a girar. Ahora el eje del motor está conectado con el potenciómetro y como motor que gira el potenciómetro y se generará una señal. Así como cambios de posición angular del potenciómetro, su señal de realimentación de salida cambia. Después de algún tiempo llega a la posición del potenciómetro en la posición de que la salida del potenciómetro es igual que la señal externa proporcionada. En esta condición, no habrá ninguna señal de salida del amplificador al motor como no hay diferencia entre la señal externa aplicada y la señal generada en el potenciómetro de entrada, y en esta situación motor deja de girar.
Control de Motor Servo:

El motor servo se controla mediante PWM (pulso con modulación) que es proporcionado por los cables de control. Hay un pulso mínimo, un pulso máximo y una tasa de repetición. Motor servo puede girar 90 grados de cualquier forma de dirección su posición neutral. El motor servo espera ver un pulso cada 20 milisegundos (ms) y la longitud del pulso determinará hasta qué punto el motor gira. Por ejemplo, un pulso de 1.5ms hará que el motor gire a la posición de 90°, tal como si el pulso es más corto de 1.5ms eje se mueve a 0 ° y si es mayor de 1.5ms que dará vuelta el servo a 180 °. Motor servo funciona en principio de PWM (modulación de anchura de pulso), su ángulo de rotación es controlada por la duración del pulso aplicado a su PIN de Control de los medios. Básicamente el motor servo se compone de motor de la C.C. que es controlado por una resistencia variable (potenciómetro) y algunos engranajes. Fuerza de alta velocidad del motor de la C.C. se convierte en par de engranajes. Sabemos que trabajo = fuerza X distancia, en motor de la C.C. fuerza es menos distancia (velocidad) es alta en Servo, fuerza es alta y y distancia es menor. Potenciómetro se conecta al eje de salida del Servo, para calcular el ángulo y detener el motor de la C.C. en el ángulo requerido.
Para recapitular, hay dos diferencias importantes entre el pulso de control del motor servo versus el motor DC. En primer lugar, el motor servo, ciclo de trabajo (tiempo vs fuera de tiempo) no tiene significado alguno, todo lo que importa es la absoluta duración del pulso positivo-que va, que corresponde a una posición de salida ordenada del eje del servo. En segundo lugar, el servo tiene su propia electrónica de potencia, flujos de potencia tan poco sobre la señal de control. Todo el poder es sacar de su cable de alimentación, que debe ser simplemente conectado a una fuente de alta corriente de 5 voltios.
Motores cinemáticos de rotación continua
Motores cinemáticos de rotación continua son en realidad una versión modificada de los servos son realmente significados, es decir, controlar la posición del eje. Los servos de rotación de 360° son hechos realmente por cambiar ciertas conexiones mecánicas dentro del servo. Sin embargo, algunos fabricantes como paralaje vende estos servos así. Con el servo de rotación continua sólo puede controlar la dirección y velocidad de los servos, pero no la posición.
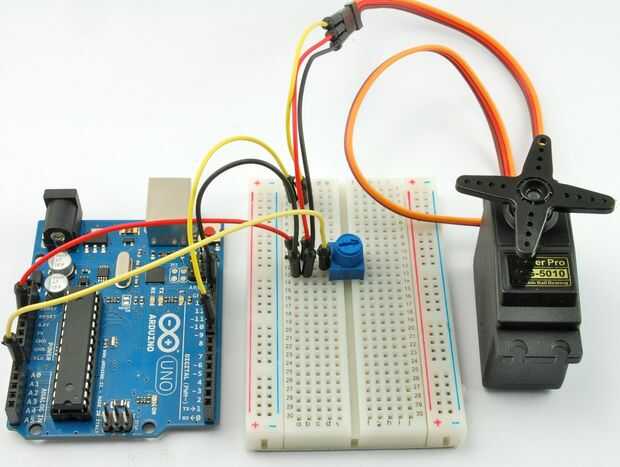
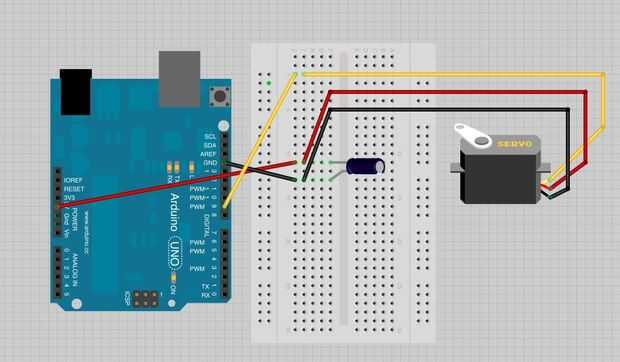
Control de Servo Arduino
Los servomotores tienen tres hilos: alimentación, tierra y señal. El cable es típicamente rojo y debe ser conectado al pin de 5V en la placa Arduino o Genuino. El cable de tierra es normalmente negro o marrón y se debe conectar a un conector de tierra en el tablero. El perno de la señal suele ser amarillo, naranja o blanco y debe conectarse al pin 9 en el tablero.
Código
Aplicaciones:
- Robótica
- Animatronics
- Radio Control coches/barcos/aviones
Ventajas:
- Bajo costo - (RC Servos) menor tamaño servos pueden adquirirse por unos pocos dólares.
- -Allí es una amplia gama de tamaños y grados de esfuerzo de torsión
- Simple de control - usando pulsos nivel lógica de un microcontrolador o un controlador servo dedicado
Limitaciones: Más servos RC están limitados a 180 grados de movimiento y posicionamiento de precisión y repetibilidad de +/-1 grado es típico.
Usted puede encontrar diferentes tipos de motor Servo en Sparkfun.com













