Paso 10: Paso a paso Motor


Un motor paso a paso es un dispositivo electromecánico que convierte pulsos eléctricos en movimientos mecánicos discretos. El eje o eje de un motor paso a paso gira en incrementos discretos cuando impulsos de mando eléctrico se aplican a él en la secuencia correcta. La rotación de los motores tiene varias relaciones directas a estos pulsos de entrada aplicadas. La secuencia de los pulsos aplicados se relaciona directamente con la dirección de rotación de ejes motor. La velocidad de la rotación de los ejes motor está directamente relacionada con la frecuencia de los pulsos de entrada y la duración de la rotación está directamente relacionada con el número de pulsos de entrada aplicada.
Motores paso a paso son motores grandes para control de posición. Se encuentran en las impresoras de escritorio, plotters, impresoras 3d, Fresadoras CNC, y cualquier cosa otra que requiere la exacta posición de control. Steppers son un segmento especial de motores sin escobillas. Se construyeron deliberadamente para par de alta retención. Este par de alta retención le da al usuario la capacidad de forma gradual "paso" a la posición siguiente. Esto resulta en un sistema de posicionamiento simple que no requiere un codificador. Esto hace muy sencillo de construir y utilizar controladores de motor paso a paso.
Una de las ventajas más importantes de un motor paso a paso es su capacidad para ser controlado con precisión en un sistema de lazo abierto. Control de lazo abierto significa que ninguna información de retroalimentación de posición es necesario. Este tipo de control elimina la necesidad de costosos dispositivos de detección y regeneración como codificadores ópticos. Su posición es conocida simplemente por hacer el seguimiento de los pulsos de entrada de paso.
¿Cuáles son buenos para motores paso a paso?
Un motor paso a paso puede ser una buena opción siempre que se requiera movimiento controlado. Puede utilizarse para ventaja en aplicaciones donde usted necesita para el control de sincronismo, velocidad, posición y ángulo de rotación.
Posicionamiento – desde steppers moverse en pasos repetibles exactos, sobresalen en aplicaciones que requieren un posicionamiento preciso como X, Y Plotters impresoras 3D, CNC, plataformas de cámara. Algunos discos también usar motores paso a paso para colocar el cabezal de lectura/escritura.
Control de velocidad – precisos incrementos de movimiento también permite para el control excelente de la velocidad de rotación para la automatización de procesos y robótica.
Esfuerzo de torsión de baja velocidad - motores de corriente continua Normal no tienen mucho torque a bajas velocidades. Un motor paso a paso tiene el par a baja velocidad, por lo que son una buena opción para aplicaciones que requieren baja velocidad con alta precisión.
Teoría de operación

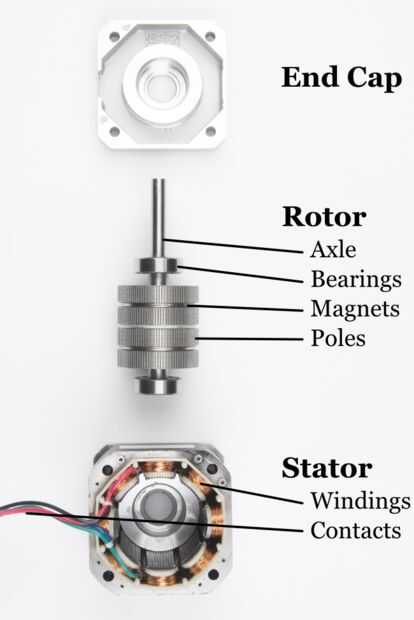
Motores paso a paso comportan exactamente igual que un motor sin escobillas, el tamaño de paso es mucho más pequeño. La única parte móvil es el rotor, que contiene los imanes. Donde las cosas se vuelven complicadas es organizar la secuencia de energización de los bobinados. La polaridad de cada bobina es controlada por la dirección del flujo de corriente. La animación muestra un patrón simple que seguirían a los controladores. La corriente alterna cambia la polaridad, dando un efecto "vaivén" de cada bobina. Una diferencia notable es la estructura de imán de un paso a paso diferentes. Es difícil obtener una gran variedad de imanes a comportarse bien en pequeña escala. También es muy caro. Para conseguir alrededor de esto, la mayoría de motores paso a paso utilizan un método de placa apilada para dirigir los polos magnéticos en los "dientes".
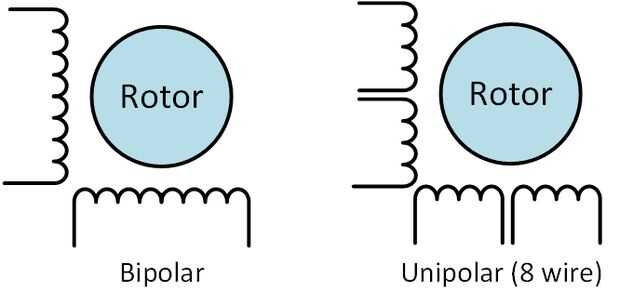
Hay dos tipos de motores paso a paso: unipolar y bipolar motores paso a paso. En un nivel fundamental, estos dos tipos funcionan exactamente del mismo modo; los electroimanes se encienden de manera secuencial, induciendo el eje central para girar.
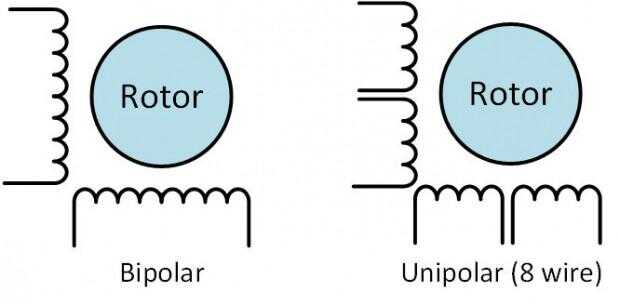
La diferencia entre los dos tipos es los niveles de tensión. Un motor de pasos unipolar sólo funciona con voltaje positivo, así que la alta y baja tensión aplicado a las bobinas electromagnéticas sería algo como 5V y 0V. Un motor de pasos bipolar tiene dos polaridades, positivas y negativas, por lo que su alta y baja tensión sería algo así como 2, 5V y - 2.5V. Tomando estas diferencias eléctricas en cuenta, la diferencia física entre estos dos estilos es que la configuración unipolar requiere un cable adicional en el centro de cada bobina para permitir que la corriente fluya a través a un extremo de la bobina o el otro. Estas dos direcciones opuestas producen las dos polaridades del campo magnético, efectivamente mímico las capacidades de voltaje positivo y negativo del motor bipolar paso a paso. Aunque ambos tienen un total rango de voltaje de 5V, el motor de pasos bipolar realmente tendrá más esfuerzo de torsión porque la corriente pasa la bobina entera, produciendo un fuerte campo magnético para inducir el eje para girar el ángulo apropiado. Por otra parte, motores unipolares paso a paso sólo utilizan la mitad de la longitud de la bobina por el cable extra en medio de la bobina, por lo menos par de torsión está disponible para magnéticamente, mantenga el eje en su lugar.
Un motor bipolar de dos fases tiene 2 grupos de bobinas. Un motor unipolar 4 fase tiene 4. Un motor bipolar de fase 2 tendrá 4 hilos - 2 para cada fase. Algunos motores cuentan con cableado flexible que le permite ejecutar el motor como bipolar o unipolar.
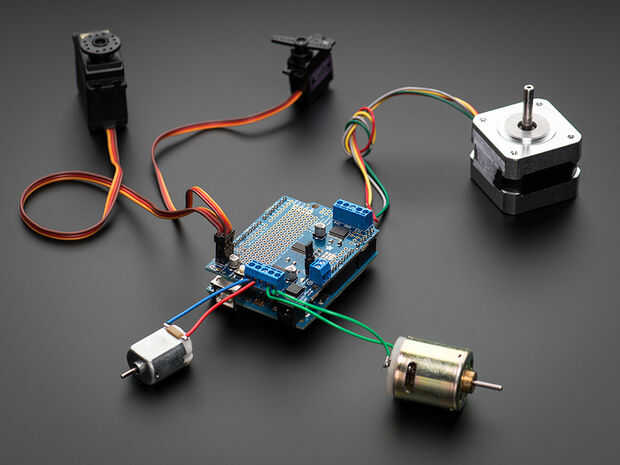
Conducir un paso a paso
Manejar un motor paso a paso es un poco más complicado que conducir a un regular había cepillado motor de corriente continua. Motores paso a paso requieren un controlador paso a paso energizar las fases en una secuencia de tiempo a girar el motor.
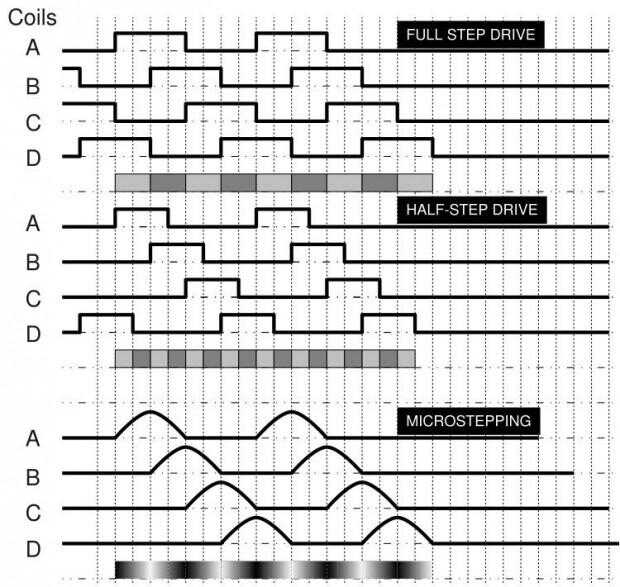
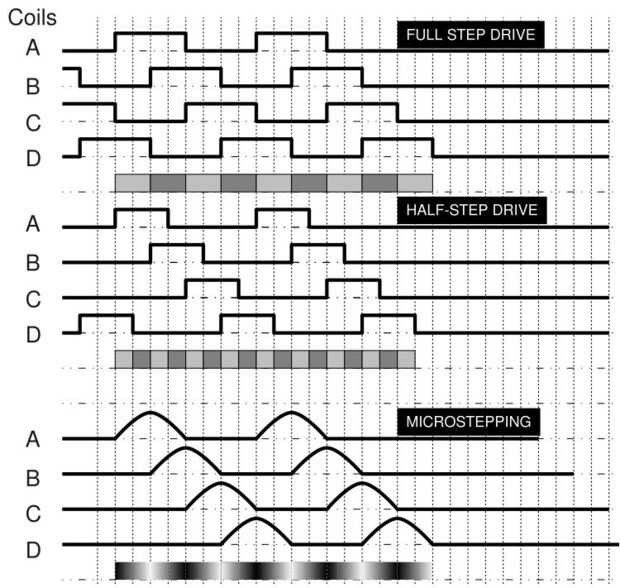
Hay varias maneras diferentes que son capaces de conducir incluyendo completo paso y medio paso microstepping motores paso a paso. Cada uno de estos estilos de conducción ofrecen diferentes cantidades de los tamaños de par y paso que puede utilizar el motor paso a paso.
Una unidad de paso completo siempre tiene dos de los electroimanes "encendidos". Para girar el eje central, uno de los electroimanes es apagado y el electroimán siguiente se activa, haciendo que el eje gire 1/4 de un diente (por lo menos para los motores de pasos híbridos). Este estilo de contar siempre con dos electroimanes tiene el par de la mayoría de todos los estilos, pero el tamaño de paso más grande. Un accionamiento de medio paso alterna entre tener dos electroimanes y un electroimán activado. Para girar el eje central, el primer electroimán está energizado como primer paso, luego el otro también está energizado mientras el primero de ellos todavía funciona para el segundo paso. El tercer paso se apaga primer electroimán y el cuarto paso se enciende el tercer electroimán, todo mientras todavía funciona el electroimán segundo. Este patrón, que se muestra en un cuadro arriba, utiliza dos veces tantos pasos como la unidad de paso completo, que permite por medio de la magnitud, pero también tiene menos par de torsión total puesto que no siempre hay dos electroimanes sosteniendo el eje central en su lugar. Microstepping, no en vano, tiene el tamaño de paso posible más pequeño de estos estilos. Una de las maneras más comunes para realizar microstepping es hacerlo "seno coseno microstepping". Esto significa que la corriente que fluye a través de cada bobina es manipulada que se crea una onda de seno/coseno. La "superposición" de las olas entre dos bobinas de resultados en un gran número de pasos. El número de pasos depende de cuántos distintos cambios en corriente que puede proporcionar a las bobinas, pero microstepping todavía tendrá el tamaño de paso más pequeño y así el movimiento más preciso, de todos los estilos. El par asociado con este estilo depende de cuanta corriente fluye a través de las bobinas en un momento determinado, pero siempre será menor que la unidad de paso completo.
El tipo más simple del conductor se puede construir con un puñado de transistores. Estos simplemente se enciende y se apaga en secuencia para energizar las fases y el motor de paso. Conductores unipolares son relativamente baratos de construir, pero sólo el trabajo con los motores unipolares. Hay un excelente tutorial sobre cómo construir uno en el sitio de Arduino.
Conducir un motor bipolar requiere 2 puentes de H completos por lo que puede invertir la corriente a las fases. Puentes de H pueden ser difíciles de construir desde cero. Pero hay un montón de chips de puente H disponibles para simplificar la tarea. El L293D es uno de los chips más populares y económicos. Estos pueden encontrarse en el corazón de primera generación más protectores de motor.
Fragmento de código siguiente puede utilizarse para control de motor paso a paso usando la placa arduino.
Aplicaciones:
- Impresoras 3D
- Máquinas CNC
- Plataformas de cámara robótica
- Impresoras
- Motorreductores de precisión
Ventajas:
- Posicionamiento preciso de la repetición
- Control de velocidad exacto
- Esfuerzo de torsión de poca velocidad excelente
- Excelente celebración de esfuerzo de torsión para mantener la posición
Limitaciones:
- Baja eficiencia
- Puede necesitar cambiar codificador o límite para establecer una posición de referencia
- Sujeto a perder pasos si sobrecarga
Más detalles de motor paso a paso:
Para pasos de buena calidad motores y controladores, visite Sparkfun.













