Paso 2: El controlador del Motor
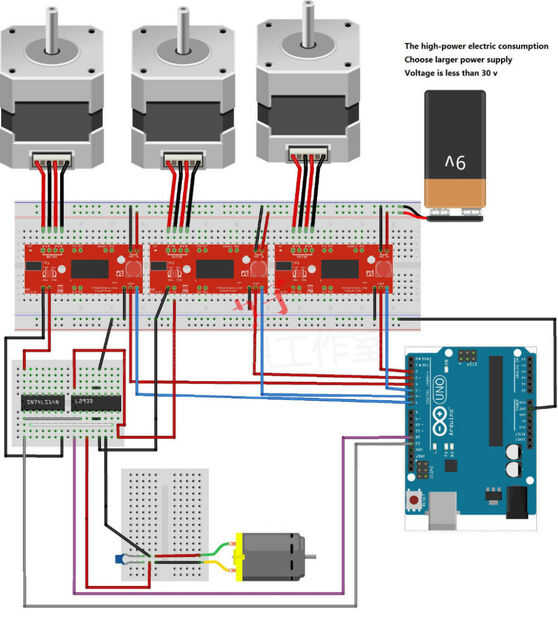


Un regulador del motor es un dispositivo electrónico que ayuda a microcontrolador para controlar el motor. El controlador del motor actúa como un dispositivo intermedio entre un microcontrolador, una fuente de alimentación o baterías y los motores.
Si bien el microcontrolador (cerebro del robot) decide la velocidad y la dirección de los motores, no puede conducir directamente debido a su muy limitada (corriente y tensión) potencia. El controlador del motor, por otra parte, puede proporcionar la corriente a la tensión requerida pero no puede decidir cómo debe funcionar el motor.
Así, el microcontrolador y el regulador del motor tienen que trabajar juntos con el fin de que los motores se mueven apropiadamente. Generalmente, el microcontrolador puede indicar el controlador del motor que potencia los motores vía un método de comunicación estándar y simple como UART o PWM. También, algunos controladores de motor pueden ser controlados manualmente por un voltaje analógico (generalmente creado con un potenciómetro).
El tamaño físico y el peso de un controlador de motor pueden variar significativamente, de un dispositivo más pequeño que la punta del dedo usado para controlar un robot de sumo mini en un gran controlador de varios Kg de peso. El tamaño de un controlador de motor generalmente está relacionada con la corriente máxima que puede proporcionar. Más grande significa mayor tamaño actual.
Puesto que hay varios tipos de motores, hay varios tipos de controladores de motor (diferentes tipo de motor requiere otro tipo de controlador):
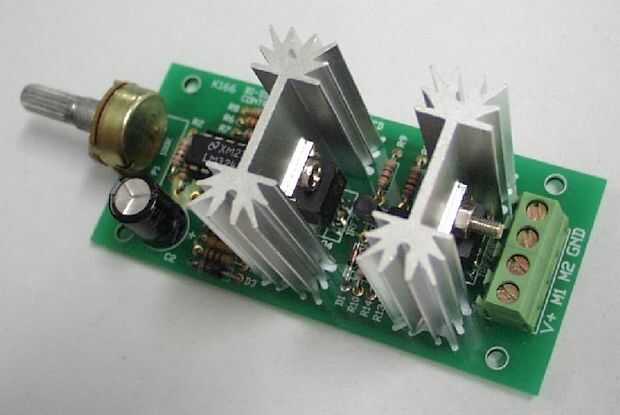
- Controladores de motor de DC de cepillado: utilizado con cepillado motorreductores DC, DC y muchos actuadores lineales.
- Controladores de motor DC sin escobillas: usado con motores DC sin escobillas.
- Reguladores del Motor servo: usado para hobby servo motores.
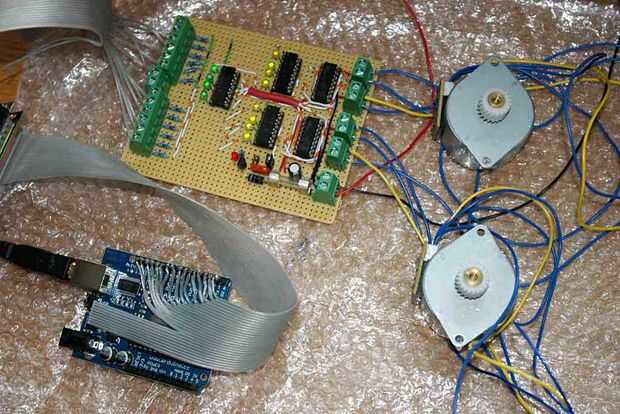
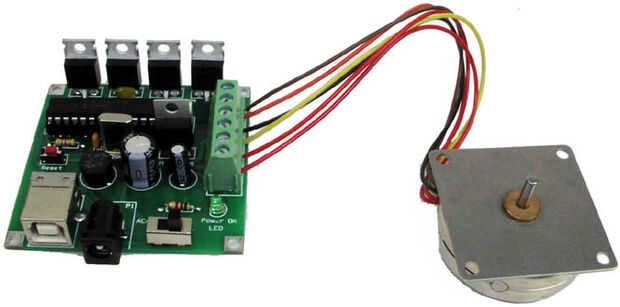
- Controladores de Motor paso a paso: utilizar con motores de pasos unipolares o bipolares según su tipo.













