Paso 4: Control de Motor DC cepillado


Controlando el término me refiero a control de la dirección y el control de velocidad. La dirección del motor DC puede ser inversa simplemente invirtiendo la polaridad de la conexión de la batería. La velocidad del motor puede ser control cambiando el nivel de voltaje y nivel de voltaje de c.c. se puede cambiar por la señal de PWM. Para un voltaje más alto nivel será más alto y para un voltaje menor velocidad nivel también será menor.
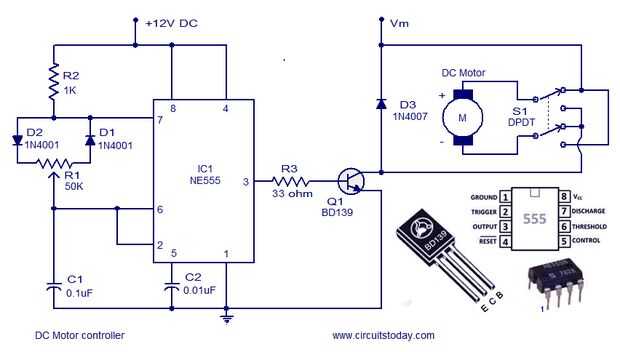
Prácticamente, circuitos de impulsión se utilizan en aplicaciones donde se utiliza un controlador de algún tipo y control de velocidad se requiere. El propósito de un circuito de impulsión debe dar el controlador de una forma de variar la corriente en los devanados del motor ASV. Los circuitos de impulsión discutidos en esta sección permiten al controlador de pulso ancho modular la tensión suministrada al motor ASV. Es la manera más eficiente para variar la velocidad de un motor BDC en comparación con los métodos tradicionales de control analógico. En algunos casos el motor sólo debe girar en una dirección entonces una topología switch solo con modulación PWM se puede utilizar para variar el voltaje aplicado al motor y así controlar su velocidad. Cuanto mayor sea el ciclo de trabajo PWM, más rápido el motor irá. La figura muestra el circuito para conducir un motor BDC en una dirección con solo FET (transistor de efecto de campo).
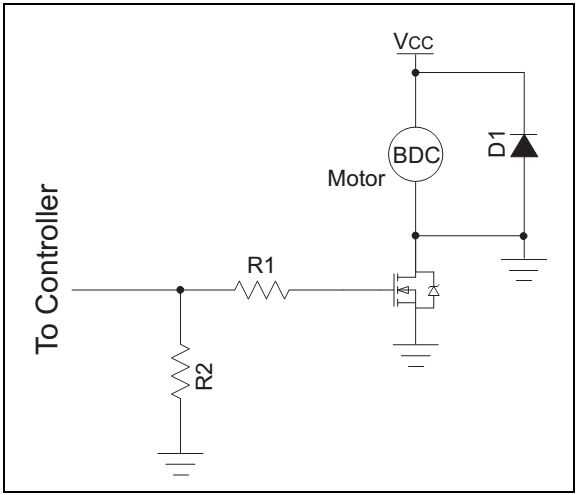
Tenga en cuenta que en el circuito hay un diodo en el motor. Este diodo está ahí para evitar que el nuevo grupo netic flujo (FEM) voltaje dañe el MOSFET. FEM se genera cuando el motor está girando. Cuando el MOSFET está apagado, el bobinado del motor todavía se cobra en este momento y produce flujo de corriente inversa. D1 debe ser clasificado apropiadamente para que se disipe esta corriente.
Resistencias R1 y R2 en la figura son importantes para el funcionamiento del circuito. R1, protege el microcontrolador de picos de corriente mientras R2 asegura que transistor está apagado cuando la clavija de entrada es tristated.
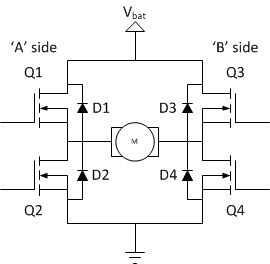
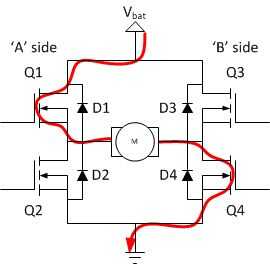
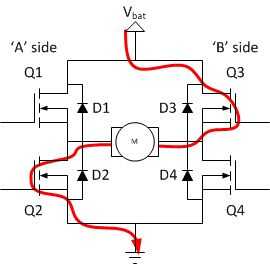
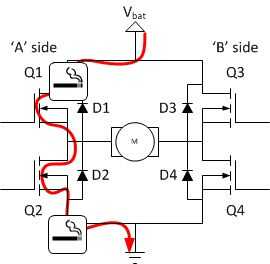
Cuando se requiere un posicionamiento o ambas direcciones de rotación necesitan (robots más necesidad) se utiliza un puente H completo con control PWM. El puente H es un circuito de transistor 4 que permite invertir el flujo de corriente al motor. Con un puente H y un pin PWM, puede controlar la velocidad y dirección del motor.
Entender por favor siga el siguiente paso.













