Paso 5: Puente en H




Un puente H es un circuito electrónico que permite una tensión que se aplicará a través de una carga en cualquier dirección. Estos circuitos se utilizan en robótica y otras aplicaciones para permitir motores correr hacia delante y hacia atrás.
Un puente H es un circuito basado en transistores capaces de manejar motores hacia la derecha y hacia la izquierda. Es un circuito muy popular – la fuerza impulsora detrás de innumerables robots debe ser capaz de moverse tanto hacia delante y hacia atrás. Fundamentalmente, un puente de H es una combinación de cuatro transistores con líneas de dos entradas y dos salidas: (Nota: allí está generalmente bastante más que un puente H bien diseñado incluyendo flyback diodos, resistores de base y Schmidt activa.)
Para entender esto, el puente H debe ser roto en sus dos lados, o mitad-puentes. Refiriéndose a Q1 y Q2 forman puente de media mientras que Q3 y Q4 forman la otra mitad-puente.
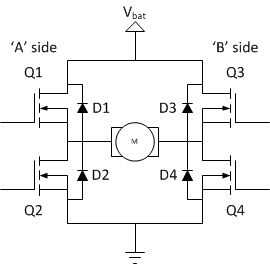
Cada uno de estos puentes de media es capaz de cambiar de un lado del motor ASV para el potencial de la tensión de alimentación o tierra. Cuando se activa Q1 y Q2 está apagado, por ejemplo, el lado izquierdo del motor será el potencial de la tensión de alimentación. Encendiendo las Q4 y dejando Q3 le tierra el lado opuesto del motor. Los elementos de conmutación (Q1... Q4) son generalmente bipolares o transistores FET, en algunas aplicaciones de alto voltaje IGBT.
Observe los diodos a través de cada uno de los transistores (D1-D4).
Estos diodos protegen a los transistores de corriente picos generados por FEM cuando se apagan los transistores. El extremo superior del puente está conectado a una potencia de alimentación (pila por ejemplo) y el extremo inferior está conectado a tierra.
Un condensador se puede utilizar con URL para el diodo. Pero es opcional. El valor de estos condensadores es generalmente en el rango de 10 pF. El propósito de estos condensadores es reducir la radiación de RF que es producida por el arqueamiento de los conmutadores.
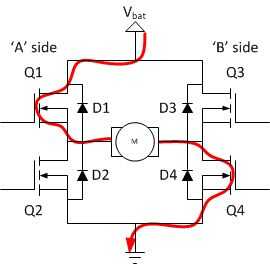
El modo de funcionamiento básico de un puente en H es bastante simple: si Q1 y Q4 están activados, el electrodo izquierdo del motor se conectará a la fuente de alimentación, mientras que el cable correcto esté conectado a tierra. Corriente empieza a fluir a través del motor que energiza el motor en (digamos) la dirección de avance y el motor del eje comienza a girar.
..............................................................................................................
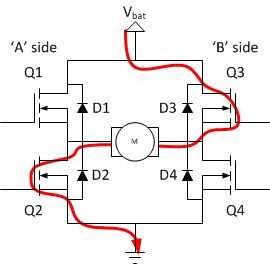
Si Q2 y Q3 están activados, sucederá lo contrario, el motor es energizado hacia atrás y el eje empezará a girar hacia atrás.
.............................................................................................................................................................................................
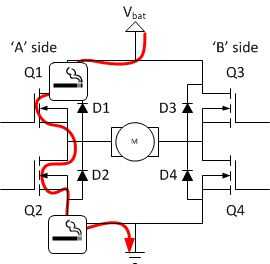
En un puente, debe cerrar nunca tanto Q1 como Q2 (o Q3 y Q4) al mismo tiempo. Si lo hiciste, sólo han creado un camino de muy baja resistencia entre el poder y la tierra, efectivamente un cortocircuito entre el suministro de energía. Esta condición se llama 'shoot-through' y es una forma casi garantizada para destruir rápidamente el puente, o algo más en tu circuito.
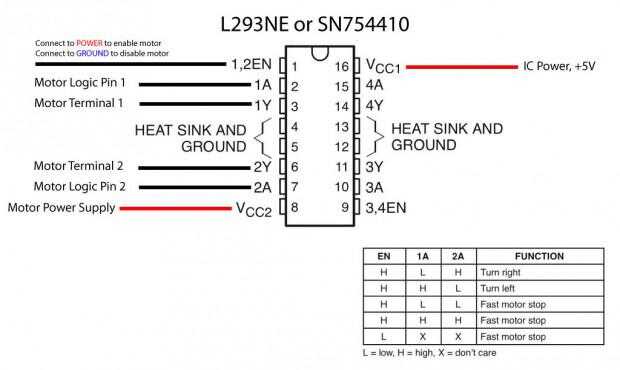
Hay muchos diversos modelos y marcas de puente H IC está disponible. Más comúnmente utilizados son Texas Instruments L293NE o L298 de STMicroelectronics y Texas Instruments SN754410.
L293D
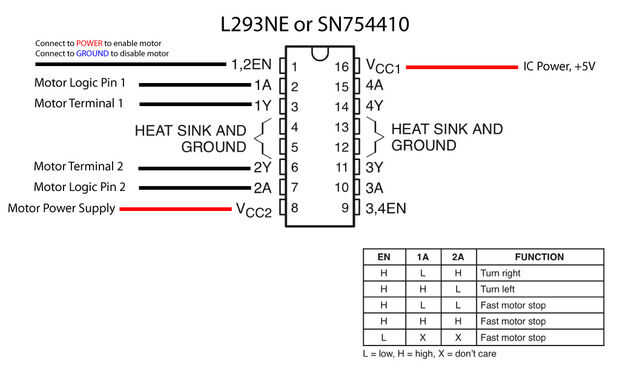
El L293NE/SN754410 es un puente H muy básico. Tiene dos puentes, uno en el lado izquierdo del chip y a la derecha y pueden controlar 2 motores. Puede subir hasta 1 amperio de corriente y funcionan entre 4, 5V y 36V. El pequeño motor de la C.C. usado generalmente en los robots robot puede ejecutar con seguridad un voltaje bajo para que funcione bien este puente en H.
El puente de H tiene los pernos y características siguientes:
- Pin 1 (1, 2EN) habilita y deshabilita el motor si es dar alta o baja
- Pin 2 (1A) es un pin de lógica para nuestro motor (entrada es ya sea alta o baja)
- El pin 3 (1Y) es uno de los terminales del motor
- Pin 4 y 5 son para la tierra
- PIN 6 (2Y) es para el motor terminal
- PIN 7 (2A) es un pin de lógica para nuestro motor (entrada es ya sea alta o baja)
- Pin 8 (VCC2) es la fuente de alimentación para el motor, este debe dar el voltaje nominal del motor
- PIN 9-11 son sólo está utilizando un motor en este laboratorio
- Pin 12 y 13 son para la tierra
- PIN 14 y 15 están desconectadas
- Pin 16 (VCC1) está conectado a 5V a continuación es un esquema del puente H y que los pernos hagan lo que en nuestro ejemplo.
- Incluido en el diagrama es una tabla de verdad indicando cómo funcionará el motor según el estado de los pines de la lógica (que se define por nuestro Arduino).
Tenga en cuenta que todos los motores están disponibles en diferentes tamaños.
Pequeños motores están diseñados para aplicaciones donde la compacidad se valora sobre par. Si bien hay pequeños motores de alto par, estos tienden a ser caros porque se utilizan imanes de tierra rara, rodamientos de alto rendimiento y otras características que añaden a su costo. Motores grandes pueden producir más esfuerzo de torsión, pero también requieren mayores corrientes. Motores de corriente alta requieren baterías más grandes de capacidad y mayores circuitos de control que no recaliente y queme bajo carga. Por lo tanto, coincide con el tamaño del motor con el resto del robot. No sobrecargue un pequeño robot con un motor grande al tamaño grande no es importante. Cuando decidido sobre el tamaño del motor, comparar torque disponible después de cualquier reducción del engranaje. Reducción del engranaje siempre aumenta el par motor. El aumento del esfuerzo de torsión es proporcional a la cantidad de reducción del engranaje: Si la reducción es de 3:1, el par se incrementa aproximadamente tres veces (pero no del todo, debido a las pérdidas por fricción).
Para módulo y puente H IC por favor visite:













