Paso 7: DC motorreductor


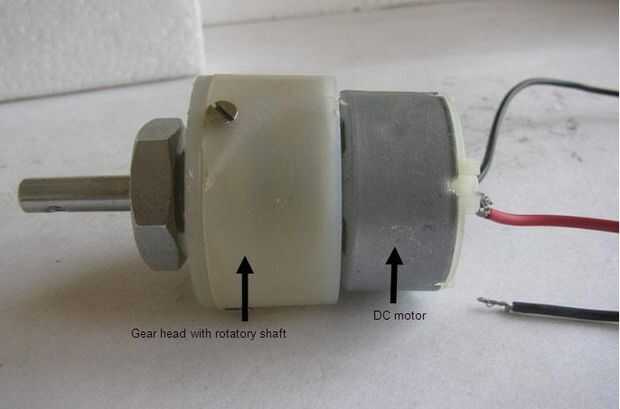
Motorreductores de C.C. pueden definirse como una extensión del motor de la C.C. que ya tenía sus detalles visión desmitificadas antes. Un motorreductor DC tiene un conjunto de engranajes conectado al motor. La velocidad del motor se cuenta en términos de rotaciones del eje por minuto y se denomina como RPM. El conjunto de cambios ayuda a aumentar el par y reduciendo la velocidad. Usando la combinación correcta de engranajes en un motor del engranaje, su velocidad se puede reducir a cualquier figura deseable. Este concepto donde engranajes reducen la velocidad del vehículo pero aumentan su par se conoce como reducción del engranaje. Esta penetración explorará todos los detalles menores y mayores que la cabeza de engranajes y por lo tanto, el funcionamiento del motorreductor DC.
Trabajo de la DC motorreductor
El motor de C.C. funciona en un rango justo de tensión. Cuanto mayor sea el voltaje de entrada es las RPM (revoluciones por minuto) del motor. Por ejemplo, si el motor funciona en el rango de 6-12V, tendrá menos RPM a 6V y 12 V máximo. En términos de voltaje, podemos poner la ecuación como: RPM = K1 * V, donde K1 = voltaje inducido constante V = voltaje aplicado.
Es muy interesante conocer el funcionamiento de los engranajes. Puede explicarse por el principio de conservación del ímpetu angular. El engranaje más pequeño radio cubrirá RPM más que el de radio más grande. Sin embargo, el engranaje más grande dará más esfuerzo de torsión para el engranaje menor que viceversa. La comparación de velocidad angular entre el engranaje de entrada (uno que transfiere energía) salida engranaje da la relación de transmisión. Cuando engranajes múltiples están conectados juntos, conservación de la energía también es seguido. La dirección en que gira el engranaje de otros siempre es lo contrario de la marcha junto a él. En cualquier motor de la C.C., RPM y par motor son inversamente proporcionales. Por lo tanto, el equipo que más esfuerzo de torsión proporcionará menor RPM y converse. En un motor engranado C.C., se aplica el concepto de modulación de anchura de pulso.
Por ejemplo, un motor de DC descargado podría centrifugado a 12000 rpm y proporcionar 0,1 kg / cm de torque. Un geardown de 225:1 se agrega proporcionalmente reducir la velocidad y aumentar el esfuerzo de torsión: 12000 rpm / 225 = 53,3 rpm y 0.1 x 225 = 22.5 kg / cm. El motor ahora será capaz de moverse significativamente más peso a una velocidad más razonable.
En un motor engranado C.C., el engranaje que conecta el motor y el engranaje de la cabeza es bastante pequeña, por lo tanto transfiere más velocidad a la mayor parte de los dientes de la cabeza del engranaje y lo hace girar. La mayor parte del engranaje más activa la parte más pequeña de dos caras. La parte duplex pequeña recibe el esfuerzo de torsión pero no la velocidad de su predecesor que transfiere a la mayor parte de otros equipos y así sucesivamente. Parte dos caras de la tercera velocidad tiene más dientes que otros y por lo tanto transfiere más esfuerzo de torsión en el engranaje que está conectado al eje.
Control de Motor de engranaje
Motor de engranaje de la C.C. se puede controlar exactamente la misma manera control de motor DC.
Aplicaciones:
- Trenes de coche robot
- Vehículos de Radio Control
- Herramientas inalámbricas
Ventajas:
- Reducción de la velocidad - DC muchos motores simplemente correr demasiado rápido para ser útil en aplicaciones de accionamiento directo.
- Par - mucho trabajo puede coaxed de un relativamente pequeño motor equipado con un tren de engranaje adecuado.
Limitaciones: Esto es especialmente un problema con los trenes de engranaje plástico bajo costo usado con motores de baja tensión. La resistencia adicional puede hacer estos trenes de engranajes reacios a baja velocidad.
Para el Motor y controlador ver: www.sparkfun.com













