Paso 4: Robots industriales




En muchas ocasiones nos nombre robots industriales con brazos de robots o manipuladores robóticos. La mayoría de nosotros ya ha estado en contacto con esta categoría. Armas de pequeño robot – juguetes, están disponibles en el mercado y construir un brazo robot bricolaje nunca fue tan fácil.
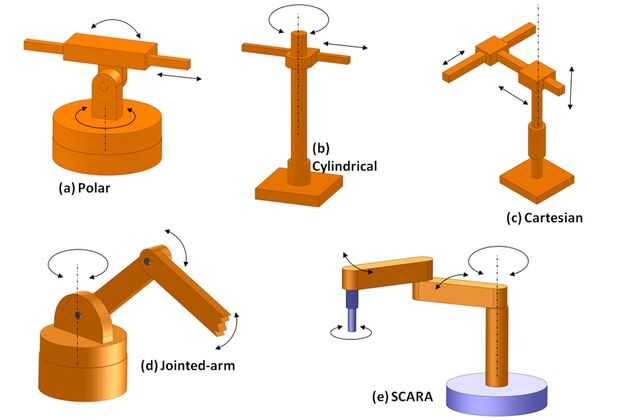
Manipulador robótico puede realizar muchas tareas diferentes, como soldadura, pintura, pulido, manejo, etc.. Cada trabajo tiene sus necesidades especiales para que los manipuladores no comparten la misma construcción. Construcciones de manipuladores se derivan de modelos matemáticos (sistemas de coordenadas) y tipos de articulaciones. Hay dos tipos principales de articulaciones: articulación rotacional y traslacional articulación. Construcciones se dividen en tipos como sigue: cartesiano, polar, cilíndrico, SKARA, articulado y delta (paralelo) manipuladores. Construcción más generalizada es manipulador articulado, principalmente porque puede funcionar como un brazo humano y puede replicar el movimiento de todo tipo. También es el más manipulador de robot.
Algunos serían cosa que manipuladores de robot pueden tener una resolución muy alta y sería un error. Máquinas CNC que tienen resolución en fila de pocos micrones se pueden hacer en garajes y manipuladores de robot tienen una resolución alrededor de pocos milímetros. Debemos saber que los robots industriales no están destinadas para el mecanizado de materiales. Mayor ventaja del manipulador es repetición de movimientos hasta pocos precisión de micrones cada vez.
Al lado de los manipuladores de robot hay otra Subcategoría – robots logísticos. Pertenecen aquí porque estamos utilizando principalmente para auxiliar en producción y en almacenes. Carros de transporte de robot y almacén robots (robots cartesianos) son robots logísticos más comunes.
 (impresión 3D)")













