Paso 3: Lista de comandos
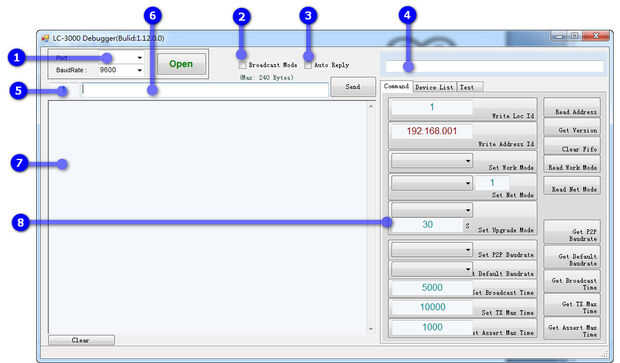
Escriba el Id de Loc:
Si desea usted cambiar Loc ID, utilice este botón. Ejecutará el comando «= 900».
Escriba el Id de dirección:
Si quieres cambiar tu ID de dirección, usuario este botón, ejecutará "901" cmd. establecer el modo de trabajo: el LC-3000 tienen 3 modo:
"0: modo velocidad completa", en este modo, el módulo permanecerá en modo de recepción en la normal, este modo tiene menos latencia de comunicación y mayor velocidad, pero el consumo de energía máximo.
«1: modo ahorro de energía ", en este modo, el módulo estará en modo de reposo y será wake up para recibir datos cada 1 seg, LC-3000 de acuerdo a 1:10 despertar y dormir en relación a la obra para garantizar que la premisa de la comunicación tanto como sea posible para ahorrar consumo de energía. En este modo, si MCU envía datos al módulo, el módulo será despertar inmediata sin ninguna demora.
"2: modo de sueño", en este modo, el módulo permanecerá en modo de reposo y sólo puede despertar cuando reciba el formulario de datos MCU. Eso significa que si establece LC-3000 en este modo, puede no puede recibir datos forma RF, sólo utilizó datos enviados aplicación pero menos consumo de energía.
Establecer el modo de actualización:
SÓLO disponible para el amo, el LC-3000 tiene una característica muy importante es poder upload remoto bosquejo a través del IDE de Arduino, este comando se utiliza a modo de actualización de entrada al otro lado. desde el M2M LC-3000 no es transmisión transparente, por lo que este comando cambiará al esclavo maestro y destino en modo P2P y envían carga de datos a través del IDE de Arduino.
Tiempo es el otro lado en modo de ahorro de energía, puede no va a recibir el comando y respuesta inmediata, así que aquí se puede establecer un tiempo de espera (unidad: S), por ejemplo 10S, el maestro permanecerá en modo de actualización durante 10 segundos y continua comando enviado al esclavo, si el esclavo aún no hay respuesta hasta a tiempo, el maestro dará para arriba y volver al modo de M2M. Si el modo de actualización de entrada de esclavos, será salir de modo de actualización por debajo de maneras:
Añadir sketch tuvo éxito, el esclavo tire bajo el perno DTR para restablecer el MCU.
Amo salir del modo de actualización, el esclavo auto salir del modo de actualización después de molino de pocos segundo.
El maestro y el esclavo están desconectados, después de molino de pocos segundo esclavo saldrá del modo de actualización.
Tenga en cuenta, en modo de actualización, el LC-3000 maestro y esclavo trabajará en modo P2P, la velocidad en baudios se depende de la configuración de P2P Baudrage, velocidad de carga de Arduino UNO R3 es normalmente 115200bps, así que si usas LC-3000 con la ONU, asegúrese de que el P2P ocupa velocidad en baudios a 115.200 bps.
Velocidad de transmisión de sistema P2P:
Modo LC-3000 ayuda M2M y modo P2P, para modo de M2M, usuario no es necesario configurar la velocidad en baudios, el LC-3000 auto detectar velocidad de MCU y aplicarlo. Pero para el modo P2P, la LC-3000 debe establecer misma velocidad en baudios como el MCU Master y el esclavo LC-3000 seguirá baudios del maestro, así que el MCU en el lado esclavo tiene que fijó también la misma velocidad en baudios.
Cómo decidir LC-3000(PA) en baudios:
Decidir la solicitud de tarifa de datos de sistema.
Asegúrese de que tanto maestro como esclavo MCU son de soporte de la tasa de baudios.
Configurar baudios LC-3000 Máster como esperar. Baudios de esclavo LC-3000 auto siga llamado velocidad de baudio del maestro.
Escribir código de MCU Master y esclavo MCU con esperan baudios.
La "velocidad de transmisión P2P" es por defecto 9600bps, si usted está utilizando LC-3000 con Arduino UNO y será remoto subir sketch, configure P2P llamado velocidad de baudio a 115200bps.
Establecer la velocidad en baudios predeterminada:
En modo de M2M, LC-3000 detectará la velocidad de transmisión UART de MCU y auto aplicar la velocidad en baudios, pero este método dependen de datos MCU envía LC-3000 a través de la UART, en algunos casos si MCU nunca envía datos LC-3000, la LC-3000 puede no detectar la velocidad de transmisión y aplicarlo, si otro lado enviar datos a través de RF, la LC-3000 enviará datos a MCU con la "velocidad en baudios predeterminada".
La "velocidad en baudios predeterminada" es por defecto 9600bps, si su MCU no es labor de 9600bps, por favor baudios LC-3000 al mismo como su UART MCU baudios.
Establecer tiempo de difusión:
En el modo de transmisión, los datos están la transmisión de una sola dirección y algún dispositivo de destino está en modo de ahorro de energía, no va a recibir los datos de difusión en el tiempo. para asegurar que todos los dispositivos de destino recibirá la transmisión de datos, puede establecer un tiempo de difusión, en el tiempo, el maestro será transmisión continua los datos de difusión, hasta el tiempo de espera o datos UART desde el MCU.
La "emisión" es una función muy útil si quieres envía datos al dispositivo multi y esperanza que pueden recibir datos en tiempo, probar esta función, tenga en cuenta suficientemente "difusión tiempo" Si utiliza esta función. El valor predeterminado es de 1000mS.
Tiempo de juego de TX:
Para asegurar la comunicación, una vez que el emisor envía datos a la recepción, necesita la respuesta del receptor un "ACK", si no consigue los datos ACK, el emisor será enviar el paquete, hasta conseguir ACK o TX tiempo hacia fuera. Valor de tiempo del conjunto TX a mayor aumentará la estabilidad de la comunicación, pero convendrá reducir la eficiencia de la comunicación.
El valor predeterminado de tiempo de TX es 10000mS. Debe observar el código de usuario MCU, respuesta ACK a otro lado cuanto antes después de paquete de datos, de lo contrario LC-3000 puede envía un ERROR a otro lado si Timeout afirman se produjo.
Conjunto afirman tiempo máximo:
Receptor tiene forma de paquete de datos de otro lado, él envió datos a MCU mediante UART inmediatamente, get MCU los datos, debe enviar un "ACK" a la LC-3000, luego LC-3000 respuesta ACK al emisor. Se trata de un proceso de toda comunicación.
El proceso de comunicación todo como abajo:
S1: Transmisor (puede ser el amo y el esclavo) MCU enviada paquetes de datos a LC-3000.
S2: TX lado enviado LC-3000 paquete de datos al lado de RX.
S3: RX lateral LC-3000 recibió el paquete de datos.
S4: RX lateral LC-3000 enviado el paquete de datos a RX MCU.
S5: MCU RX tiene el paquete, envía ACK a LC-3000 RX parte
S6: LC-3000 RX parte envía ACK a LC-3000 S7 TX lado: LC-3000 TX parte recibido el ACK
S8: LC-3000 TX parte envía ACK a MCU TX lado
S9: MCU TX parte consiguió el ACK, transmisión del paquete completa.
Afirmar Max Time es funcionaron entre S5 y S6, si LC-3000 datos enviados al MCU, pero MCU no respondieron, después de afirmar el tiempo es hacia fuera, la RX LC-3000 será contestar un ERROR TX LC-3000, luego MCU de TX sabrá que esta transmisión falla.
Si el MCU es lento, o gran cantidad de procesamiento de datos, puede aumentar el valor de tiempo de hacer valer. El valor predeterminado es: 1000mS, que significa MCU debe responder ACK dentro de 1000mS después datos recibidos forman LC-3000.
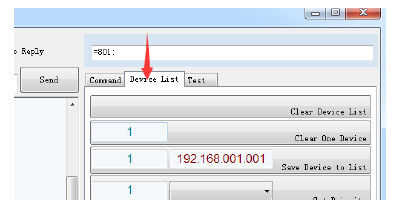
Borrar la lista de dispositivos:
Presione este botón para borrar todo dispositivo.
Borrar un dispositivo:
Presione este botón para borrar el dispositivo especificado.
Guardar el dispositivo a la lista:
usuario puede Agregar dispositivo por dos maneras:
Por la vinculación de operación: botón de prensa CFG/par y mantenga durante 3 segundos, el dispositivo entrada operación de emparejamiento, después emparejados, UID de la otra parte se escribirá en la lista de dispositivos locales.
Guardar el dispositivo a la lista de comando: excepto la operación de emparejamiento, usuario puede ser dispositivo de escritura directa en lista, por favor nota, el maestro sólo puede escribir esclavo en la lista y esclavo es también, serán comunicación sólo maestro y esclavo escriben a la lista unos a otros.
Establecer prioridad:
Desde el LC-3000 trabajando en Multi Multi modo, puede haber conflictos de comunicación entre varios dispositivos, el dispositivo importante puede ajustarse a una prioridad más alta, con el fin de asegurar la comunicación.
Aquí tienen prioridades de nivel 4, 0 es máxima y 3 es el más bajo, el valor predeterminado es 2.
Obtener lista de dispositivo cambió la cuenta:
Este comando devolver el número de lista cambiado de dispositivo y su rango de valores: "00000" ~ "65535". Cada vez que cuando la lista de dispositivos cambie la DEV_LIST_CHANGE_COUNT aumentará uno. Por consulta de la DEV_LIST_CHANGE_COUNT, la aplicación puede saber claramente si la lista de dispositivos se ha modificado o no.
Obtener lista máscara de dispositivo:
Obtener la máscara de la lista de dispositivo de LC-3000. La DEV_MASK consiste en cadena hexadecimal de 16 bytes y cada bit de los mapas en un dispositivo de la lista de dispositivos. Si el bit está establecido, indica que el dispositivo correspondiente en la lista de dispositivos es válido; de lo contrario, la información del dispositivo no es válida.
Obtener el dispositivo de la lista:
Leer información de dispositivo una lista de dispositivos. ENABLE indica si el dispositivo es válido o no. HABILITAR = 0, la información del dispositivo no es válida; ACTIVAR = 1, la información del dispositivo es válida.







")

")


")
