Este controlador ha incorporado, protección de polaridad inversa para que si accidentalmente conecta la batería o fuente de alimentación de la manera equivocada entonces la Junta no será dañada. Para hacer todo lo más fácil posible para los principiantes, se ha escrito una biblioteca de funciones útiles para el controlador.
Un robot puede construirse simplemente tapando en algunos motores, servos y sensores. Utilizando el IDE de Arduino y la biblioteca suministrado, relativamente poco código se requiere para hacer un robot funcional.
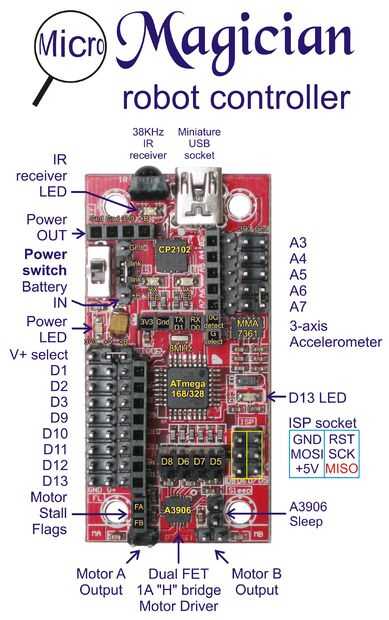
Hardware:
- Pequeño tamaño del PWB (30 mm x 60 mm).
- Interruptor de protección contra polaridad inversa y poder.
- Funcionamiento Atmega168 o ATmega328 a 3,3 v, 8 MHz.
- Construido en miniatura USB interfaz conCP2102 interfaz IC.
- Receptor de infrarrojos proporciona 128 botones virtuales a través de control remoto universal TV.
- Acelerómetro de 3 ejes detecta ángulo, impacto y caída libre.
- 1A doble puente "H" con electrónica de frenado y puesto de detección.
- 8 x salidas de servo voltaje seleccionable.
- Jefes de comunicaciones de ISP y serie.
- LEDs de indicación para la detección de señal de poder, TX, RX, D13 y IR.
Firmware:
- Arduino Pro (3.3V a 8 MHz) gestor de arranque instalado previamente.
Software:
El mago del Micro es totalmente compatible con el IDE de Arduino.
La suministrada MicroM biblioteca proporciona funciones y código de ejemplo lo siguiente:-
- DC dual motor cepillado: Velocidad, dirección y frenado.
- Solo motor paso a paso: Todo el paso, medio paso, dirección, baja potencia.
- acelerómetro de 3 ejes: Impacto detección, dirección y magnitud - elimina la necesidad de interruptores de parachoques.
- Decodificador SONY IR (SIRC): Ofrece hasta 128 botones virtuales usando SONY compatible con mandos a distancia IR.



")
")








