Paso 2: Conductor del motor de 1A doble
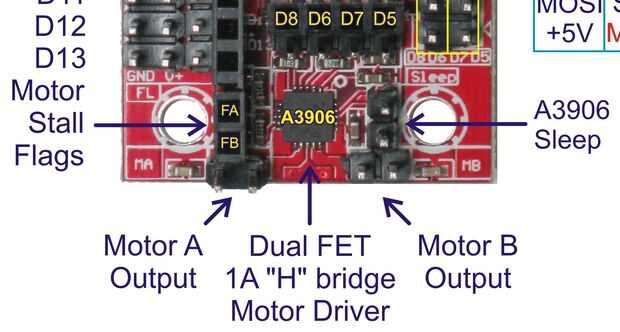
El mago Micro ha sido diseñado para limitar la máxima corriente a sobre 910mA para que principiantes no pueden dañar la Junta accidental cortocircuitos en las salidas de motor o un motor demasiado grande para este controlador de conexión del motor.
Cuando un motor dibujar demasiada corriente (por ejemplo, el robot se atasca y no puede moverse) un pin de salida que se llama una "bandera de parada" irá desde alto a bajo para indicar que motor se ha estancado. Si desea utilizar estos puesto de banderas entonces debe usar cables de puente para conectar a las entradas de su elección.
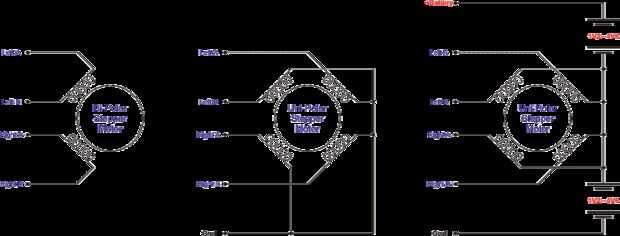
Este regulador del motor también puede manejar un motor paso a paso pequeño solo. Hay muchos tipos de motores paso a paso. Con diferentes números de cables. El más simple es un motor bipolar paso a paso y tiene 2 devanados o bobinas con 4 cables. Estos motores están conectados con un bobinado conectado a cada salida del motor.
Si su proyecto no requiere de motores de la C.C. después poniendo un jumper en los pines de "sueño" desactivará al controlador motor IC. Los controladores de motor de pines de control (D5, D6, D7, D8) entonces pueden ser utilizados para otros fines. Pernos de D5 y D6 son capaces de salida PWM.
Cabe señalar que las salidas de motor pueden usarse para controlar otros dispositivos además de los motores. Por ejemplo, LEDs de alta intensidad, bicolor LEDs y relés de pequeño pueden todos ser conducidos de las salidas de motor.



")
")








