Paso 4: Servos
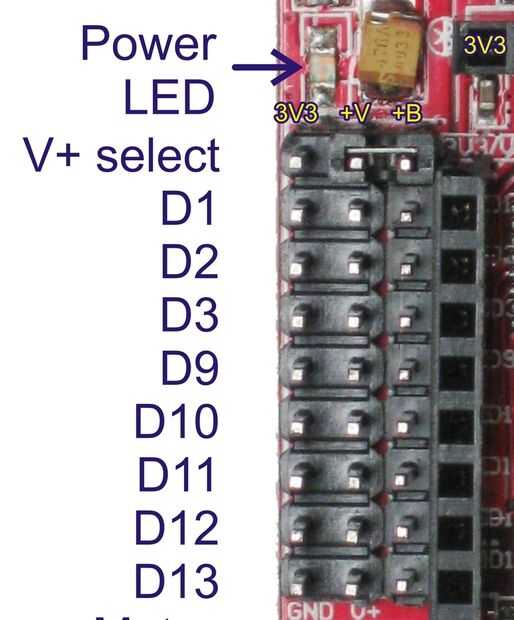
Cuando conducción servos directamente desde el controlador, el V + seleccione puente deben cambiarse de 3.3V a VB. Esto permitirá que los servos ser accionado por el voltaje de la batería en lugar de los 3, 3V regulador. Asegúrese de que su voltaje de la batería es conveniente.
Si usas un 7.4V LiPo batería entonces reemplace el puente con dos diodos 3A conectados en serie. Esto disminuirá la tensión de la batería por unos 1.3V para no dañar los servos que suelen tienen una nominal de 6V.
Tenga en cuenta que D1 es el pin de TX los procesadores utilizado en comunicaciones serie, subidas de programa y serial monitor de depuración. Todavía se puede utilizar para un servo pero el servo conectado a este pin será inquietud incontrolable durante la serie de comunicaciones. Mi QuadBot pone un tick nervioso cuando subo nuevo código. Una vez que el programa cargue entonces todo está bien.



")
")








